고정밀 객체 탐지를 위한 계층형 모듈러 네트워크
** 본 논문은 일반 클래스 탐지를 담당하는 1단계와, 각 일반 클래스별 세부 클래스를 정밀하게 구분·위치 추정하는 2단계로 구성된 두 단계 계층형 모듈러 구조를 제안한다. Faster‑RCNN을 기본 블록으로 사용하고 전이 학습으로 초기화한 뒤, 전체 5개의 일반 클래스를 1단계에서 탐지하고, 각 일반 클래스당 2개의 세부 클래스를 담당하는 5개의 2단계 네트워크를 연결한다. 실험 결과, 기존 최첨단 다중 클래스 탐지기 대비 분류 오류를 …
저자: Erez Yahalomi
**
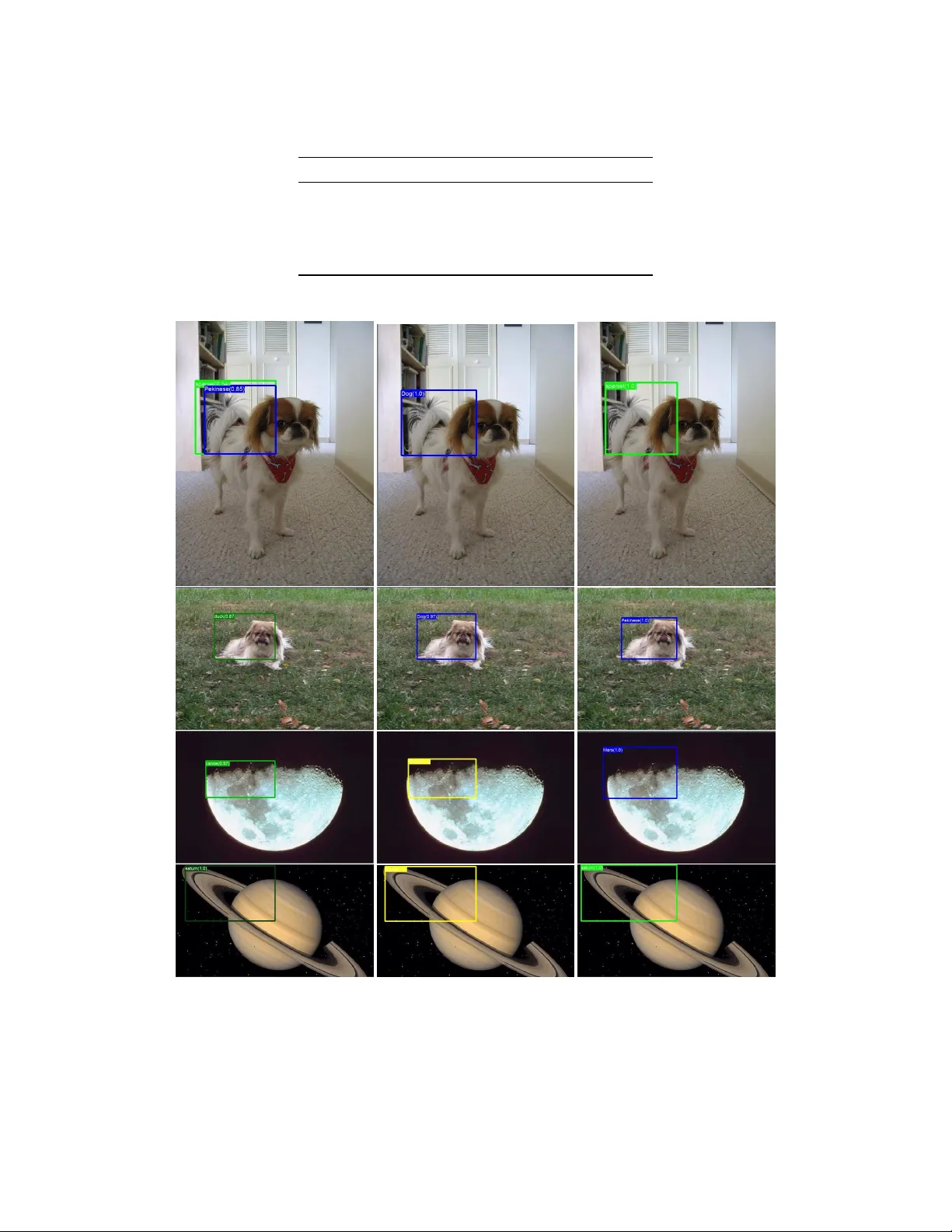
본 논문은 객체 탐지 정확도를 획기적으로 향상시키기 위해 **두 단계 계층형 모듈러 네트워크**를 제안한다. 첫 번째 단계는 하나의 딥러닝 객체 탐지 네트워크(주로 Faster‑RCNN)를 사용해 사전에 정의된 ‘일반 클래스’를 탐지한다. 일반 클래스는 의미적으로 유사하거나 세부 구분이 필요한 클래스들을 하나로 묶은 것으로, 예를 들어 ‘스포츠 바이크/산악 바이크’, ‘펭귄/오리’, ‘카약/카누’, ‘화성/토성’ 등이 있다. 이 단계에서는 전체 이미지에 대해 한 번의 추론만 수행한다.
두 번째 단계는 **다수의 독립 서브 네트워크**로 구성된다. 각 서브 네트워크는 첫 단계에서 특정 일반 클래스로 판정된 객체를 입력받아, 해당 일반 클래스에 속하는 **세부 클래스**를 정밀하게 구분하고 위치를 재조정한다. 논문에서는 5개의 일반 클래스를 각각 두 개의 세부 클래스로 나누어, 총 5개의 서브 네트워크를 구축하였다. 모든 서브 네트워크는 동일한 구조(Faster‑RCNN)와 전이 학습(Imagenet) 가중치를 사용하지만, 학습 데이터는 해당 일반 클래스에 속하는 이미지와 부정 이미지(negative)만을 포함한다.
### 이론적 배경
저자들은 **클래스 수 감소가 분류 오류를 감소시킨다**는 가설을 수식화하였다. 전체 특징 공간을 x={x₁,…,x_f}라 하고, 클래스 집합을 c={c₀,…,c_n}이라 할 때, 각 클래스가 차지하는 특징 수 S는 S≈L+T·n+U 로 근사된다(L: 전이 학습 기반 특징, T: 미세조정 기반 특징, U: 다중 클래스가 공유하는 특징). 여기서 n이 커질수록 S가 감소하므로, 동일한 네트워크 용량 내에서 각 클래스당 할당되는 특징이 적어져 분류 오류가 증가한다. 따라서 **클래스 수를 줄이면(즉, 일반 클래스로 묶으면) 각 클래스에 더 많은 특징이 집중되어 정확도가 향상**된다는 것이 이론적 근거이다.
또한, **상한 sup K(r,a,d,h,q)** 를 도입해 네트워크가 가질 수 있는 총 특징 수가 제한됨을 강조한다. 이 상한을 초과하면 필터 간 중복 및 특징 간 간섭이 발생해 분류 오류가 급증한다.
### 구현 및 실험
- **데이터셋**: 원본 522장 이미지에 대칭, 밝기, 대비, 선명도 변형을 적용해 46 044장의 학습 이미지 생성. 10개의 세부 클래스(5개의 일반 클래스 × 2세부)와 부정 이미지 포함. 테스트 셋은 원본 125장 → 교차 검증으로 647장.
- **베이스 모델**: Faster‑RCNN (ResNet‑101 백본) 사용, 전이 학습 가중치 초기화.
- **비교 대상**: 동일한 Faster‑RCNN을 사용해 10개의 세부 클래스를 한 번에 학습하는 **단일 다중 클래스 네트워크**.
- **평가 지표**: 분류 오류율, 평균 정확도(mAP).
#### 결과
- **분류 오류**: 단일 네트워크 12 % → 모듈러 2.5 %~4.5 % (약 3‑5배 감소).
- **mAP**: 0.94 (단일 네트워크 대비 현저히 높음).
- **추론 비용**: 계층형 구조 덕분에 전체 이미지에 대해 1단계 추론은 한 번, 2단계는 해당 일반 클래스가 검출된 경우에만 수행되므로, 전체 연산량은 다중 네트워크를 독립적으로 실행하는 경우보다 크게 절감된다.
### 위험 요소 및 보완책
1. **1단계 false‑negative**: 첫 단계에서 객체를 놓치면 해당 객체는 2단계에 전혀 전달되지 않아 전체 정확도가 저하될 수 있다. 이를 완화하기 위해 연속 이미지 시퀀스에 적용 가능한 ‘모듈러 v.2’를 제안한다. 이 버전은 한 번이라도 일반 클래스를 검출하면 전체 시퀀스에 대해 2단계 추론을 수행한다.
2. **베이스 네트워크 의존성**: 1단계와 2단계 모두 동일한 Faster‑RCNN을 사용하므로, 베이스 네트워크 자체의 한계가 전체 시스템에 직접적인 영향을 미친다. 논문은 이를 수식 a < (a+Δ₁)(a+Δ₂) 로 표현해, 1·2단계 각각의 정확도 향상이 충분히 커야 전체 시스템이 기존 다중 클래스 네트워크보다 우수해진다고 주장한다.
3. **서브 네트워크 관리**: 클래스가 많아질수록 서브 네트워크 수가 급증하고, 모델 저장·배포·업데이트 비용이 증가한다. 저자는 필요에 따라 **추가 계층**(3단계 이상)으로 확장하거나, 유사한 세부 클래스를 하나의 서브 네트워크에 통합하는 방안을 제시한다.
### 의의 및 향후 연구
- **범용 플랫폼**: 기존 최첨단 탐지기(Faster‑RCNN, YOLO, SSD 등)를 그대로 모듈러 구조에 삽입 가능하므로, 기존 연구·산업 현장에 손쉽게 적용할 수 있다.
- **세부 구분이 중요한 도메인**: 의료 영상(병변 세부 구분), 제조 검사(결함 유형 구분), 자율 주행(차량 종류 구분) 등에서 높은 정확도가 요구되는 상황에 특히 유리하다.
- **확장성 검증 필요**: 현재 실험은 비교적 작은 데이터셋과 제한된 클래스 수에 기반한다. 대규모 COCO, OpenImages와 같은 데이터셋에서의 성능, 실시간 처리 요구사항, 하드웨어 제한 등을 고려한 추가 연구가 필요하다.
결론적으로, 이 논문은 **‘클래스 수를 인위적으로 줄이고, 계층적으로 재구성함으로써 기존 네트워크의 용량을 효율적으로 재활용한다’**는 전략을 실증적으로 입증하였다. 이는 딥러닝 객체 탐지 분야에서 새로운 설계 패러다임을 제시하며, 특히 세부 구분이 중요한 응용 분야에 큰 파급 효과를 기대할 수 있다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기