딥러닝 기반 디지털 보행 분할 혁신
초록
본 연구는 허리와 양쪽 발목에 부착한 관성 센서 데이터를 이용해, 팽창 합성곱(dilated convolution) 기반 심층 신경망(GSN)을 설계·학습시켜 보행 초기·최종 접촉 시점을 정확히 검출한다. 파킨슨병 환자 71명과 건강 대조군 67명을 포함한 대규모 데이터셋으로 검증했으며, 기존 파형 변환(wavelet transform) 기반 알고리즘보다 평균 오류와 변동폭(IQR)이 현저히 낮았다. 또한 검출된 이벤트를 바탕으로 보행 보폭, 착지·스윙 시간 등 고수준 특성을 신뢰성 있게 추정하였다.
상세 분석
이 논문은 착용형 관성 센서가 제공하는 24채널(가속도·자이로 각 3축, 3개 센서) 시계열을 입력으로 하는 6계층 딥 CNN, 즉 Gait Segmentation Network(GSN)를 제안한다. 첫 번째 층은 128개의 필터를 갖는 일반 합성곱을 적용하고, 이후 5개의 팽창 합성곱을 순차적으로 쌓아 리셉티브 필드를 기하급수적으로 확대한다. 각 합성곱 층은 배치 정규화와 ReLU 활성화를 거치며, 잔차 연결(residual connection)과 1×1 컨볼루션을 이용해 차원 일치를 보장한다. 이러한 설계는 시계열 데이터의 장기 의존성을 효과적으로 포착하면서도 학습 안정성을 높인다.
데이터 전처리 단계에서는 센서의 원시 가속·자이로 데이터를 전역 좌표계에 정렬하고, 평균 0·분산 1로 정규화한다. 라벨은 GAITRite 매트에서 추출한 초기 접촉(IC)·최종 접촉(FC) 시점을 기준으로 하며, 네 개의 별도 출력(좌·우 발 IC, FC)으로 구성한다. 네트워크 출력은 각 시점에 대한 이벤트 발생 확률을 제공하고, 후처리 단계에서 확률 피크를 검출해 최종 이벤트를 결정한다.
학습은 5‑fold 교차 검증으로 수행했으며, 동일 피험자의 데이터가 훈련·검증 집합에 동시에 포함되지 않도록 샘플을 그룹화했다. 손실 함수는 이진 교차 엔트로피이며, Adam 옵티마이저를 사용해 가중치를 업데이트한다.
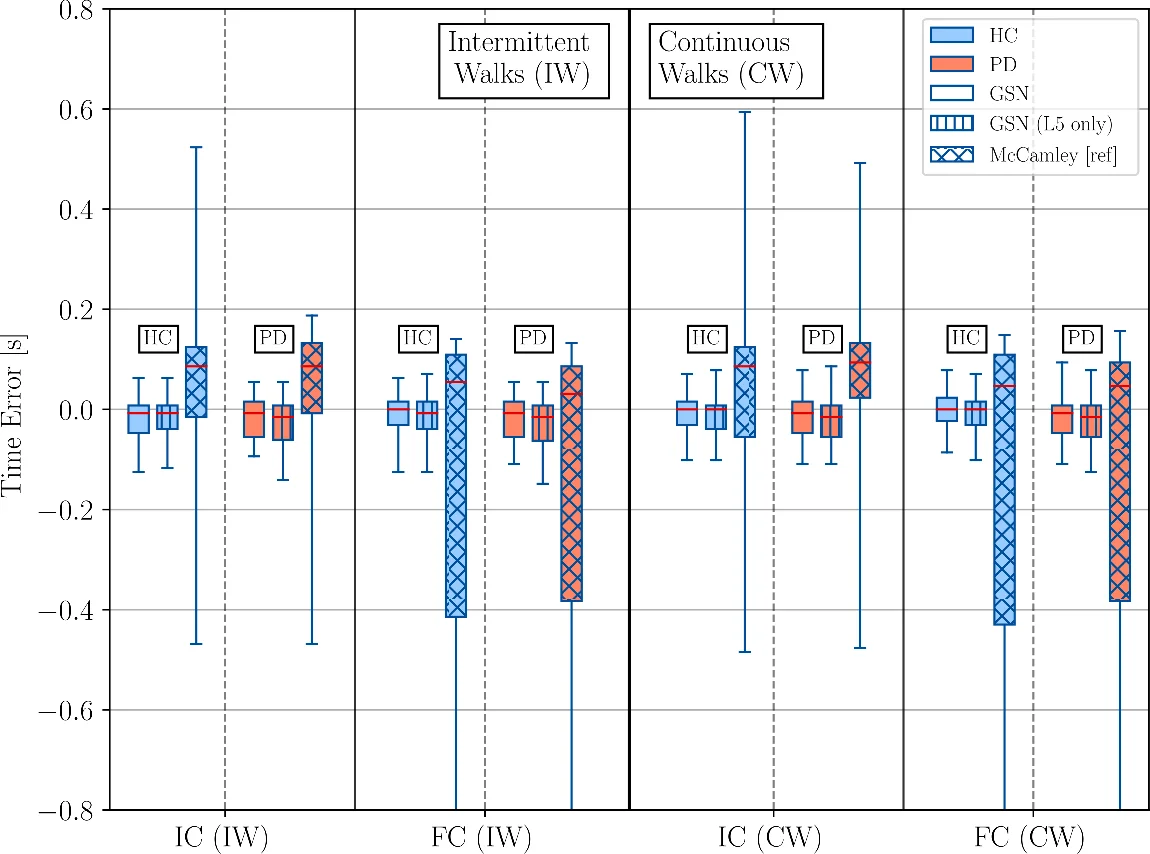
성능 평가는 GAITRite 기준과 기존 파형 변환(WT) 알고리즘을 비교함으로써 수행되었다. 결과는 모든 이벤트에서 GSN이 평균 오류와 IQR 측면에서 WT보다 우수함을 보여준다. 특히 최종 접촉(FC) 검출에서 WT는 IQR가 약 0.52 s에 달하는 반면, GSN은 최악의 경우에도 0.07 s 이하로 유지되었다. 파킨슨병군에서도 약간의 성능 저하가 있었지만, 편향(bias)은 8 ms 이하, IQR은 70 ms 이하로 충분히 실용적이었다.
고수준 보행 특성(보폭, 스탠스·스윙 시간)의 평균·변동성·비대칭성을 GAITRite와 비교했을 때, GSN은 편향이 거의 없으며 변동성·비대칭성에서 약간의 음의 편향을 보였지만 전반적으로 신뢰할 수 있는 추정값을 제공한다. 이는 단일 허리 센서(L5)만을 사용한 버전에서도 동일하게 나타나, 자유 생활 환경에서의 적용 가능성을 시사한다.
한계점으로는 데이터셋이 실험실 환경(10 m 직선 보행·25 m 원형 트랙) 중심이며, 다양한 보행 속도·표면·외부 방해 요인에 대한 일반화 검증이 부족하다. 또한 이벤트 검출 후 피크 탐지 단계가 별도로 필요해 실시간 구현 시 추가 최적화가 요구된다. 향후 연구에서는 다양한 환경·보행 패턴을 포함한 데이터 확장, 경량화 모델 설계, 그리고 보행 이상(낙상 위험 등) 예측과의 연계가 기대된다.
댓글 및 학술 토론
Loading comments...
의견 남기기