배터리 전기차를 위한 다목표 친환경 경로 모델 개발 및 평가
초록
본 연구는 대규모 네트워크에서 배터리 전기차(BEV)와 내연기관 차량(ICEV)의 사용자 균형(Nash optimum) 교통 할당을 적용한 다목표 친환경 경로(Eco‑routing) 모델을 구축하고, 미시 교통 시뮬레이션을 통해 에너지·연료 소비와 여행시간에 미치는 영향을 정량적으로 평가한다. 결과는 혼잡 수준에 따라 BEV 에너지 절감이 10‑14 %에 달하고, ICEV 연료 절감은 0.1‑10.6 %에 이르며, 고혼잡 상황에서는 평균 여행시간이 최대 10.1 % 감소함을 보여준다.
상세 분석
이 논문은 친환경 경로 탐색을 단순 최단거리 혹은 최소시간 문제가 아니라, 에너지·연료 소비와 여행시간을 동시에 고려하는 다목표 최적화 문제로 재정의한다. 핵심은 사용자 균형(Nash equilibrium) 하에서 각 운전자가 자신의 목적함수(에너지·시간 가중합)를 최소화하도록 경로를 선택하도록 모델링한 점이다. 이를 위해 저자들은 기존의 사용자 균형 교통 할당(UE) 모델에 다목표 비용 함수를 삽입하고, 각 차량 유형별 에너지 소비 모델을 미시 시뮬레이터(VISSIM 혹은 AIMSUN 등)와 연동하였다. BEV와 ICEV의 에너지·연료 소비 특성을 구분하기 위해, 주행 사이클(속도·가속·감속)과 도로 유형(고속도로·동맥도로)의 영향을 반영한 회귀 기반 모델을 구축하였다. 특히 BEV는 회생제동 효율, 배터리 전압·전류 특성, 온도 등에 민감하므로 저속 구간에서 에너지 효율이 크게 향상되는 반면, ICEV는 고속 구간에서 연료 효율이 상대적으로 높다. 이러한 차이를 반영해 각각의 차량군에 맞는 가중치를 부여하고, 다목표 비용 함수를 (C = \alpha \cdot \text{시간} + (1-\alpha) \cdot \text{에너지/연료}) 형태로 정의하였다.
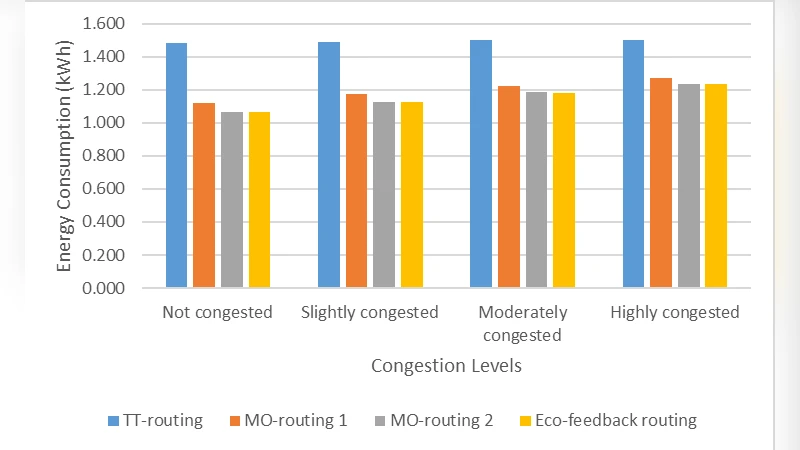
시뮬레이션은 네 개의 혼잡 시나리오(비혼잡, 약간 혼잡, 중간 혼잡, 고혼잡)로 구성되었으며, 각 시나리오마다 다목표 UE와 전통적 UE, 그리고 시스템 최적(SO) 할당을 비교하였다. 결과는 다음과 같다. 첫째, 다목표 UE는 BEV의 에너지 소비를 13.5 %~10.7 % 감소시켰으며, ICEV는 0.1 %~10.6 % 감소시켰다. 둘째, 고혼잡 상황에서 다목표 UE는 평균 여행시간을 기존 UE 대비 최대 10.1 % 단축시켜, 시스템 최적에 근접한 성능을 보였다. 셋째, 에너지 절감 효과는 혼잡도가 높을수록 감소하는 경향을 보였는데, 이는 혼잡으로 인한 저속·정체 구간이 늘어나 BEV의 회생제동 이득이 제한되기 때문이다.
이러한 결과는 다목표 친환경 경로가 단순 에너지 절감만을 목표로 할 경우 발생할 수 있는 여행시간 급증 문제를 완화하면서도, 전체 교통 시스템의 효율성을 향상시킬 수 있음을 시사한다. 또한, 차량 유형별 에너지 특성을 정밀히 모델링하고, 사용자 균형 프레임워크에 통합함으로써 실제 교통 운영에 적용 가능한 실용적인 의사결정 도구를 제공한다는 점에서 학술적·실무적 기여가 크다.