AI‑FML 로봇 에이전트로 구현하는 학생 학습 행동 온톨로지: 영어 말·듣기 교육 혁신
초록
본 논문에서는 영어 말·듣기 영역에 적용 가능한 학생 학습 행동 온톨로지 구축을 위해 AI‑FML 로봇 에이전트를 제안한다. 제안된 시스템은 인식 지능, 계산 지능, 인지 지능을 포함한 온톨로지를 기반으로 하며, 각각 인식 에이전트, 계산 에이전트, 인지 에이전트라는 세 가지 지능형 에이전트로 구성된다. 인식 에이전트와 인지 에이전트는 로봇 Kebbi Air에 탑재되고, 계산 에이전트는 딥 뉴럴 네트워크(DNN) 모델을 클라우드에서 운영하며 인터넷을 통해 다른 에이전트와 통신한다. 이 AI‑FML 로봇 에이전트는 대만에서 적용 후 일본에서 테스트했으며, 실험 결과 인간‑기계 협동 학습 모델에 유용하게 활용될 수 있음을 확인하였다.
상세 분석
1. 연구 배경 및 필요성
- 학습 행동 온톨로지는 학생의 학습 과정과 행동을 구조화·표준화하여 교육 데이터 분석 및 맞춤형 피드백에 핵심적인 역할을 한다.
- 기존 연구는 주로 정적 온톨로지 구축에 머물렀으며, 실시간 학습 행동 인식·피드백을 제공하는 동적 시스템은 부족했다.
- AI‑FML(Fuzzy Markup Language) 기반 로봇 에이전트는 퍼지 로직을 활용해 불확실한 학습 행동 데이터를 정량화하고, 로봇을 매개로 실시간 상호작용을 가능하게 한다.
2. 제안 시스템 구조
| 구성 요소 | 역할 | 구현 위치 |
|---|---|---|
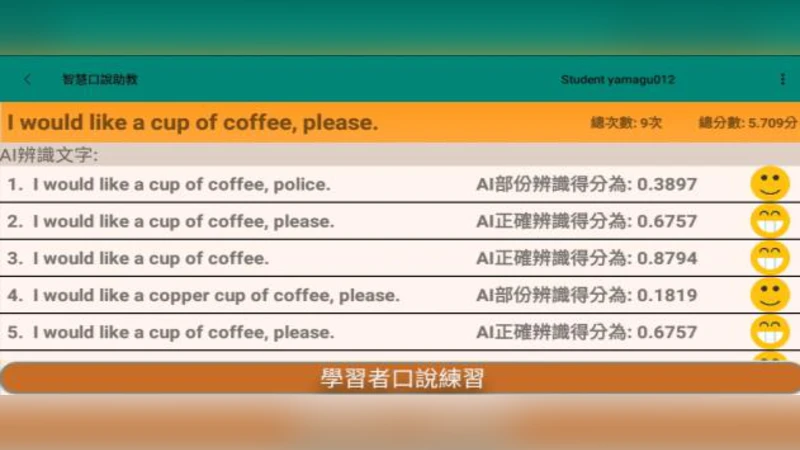
| Perception Agent | 센서(음성, 마이크, 카메라) 데이터를 수집·전처리, 학생의 발화·청취 행동을 퍼지화 | 로봇 Kebbi Air |
| Cognition Agent | 퍼지 규칙 기반 추론, 학습 상태(예: 집중도, 이해도) 판단, 피드백 생성 | 로봇 Kebbi Air |
| Computational Agent | DNN 모델을 이용한 고차원 패턴 인식(예: 발음 정확도, 억양 분석) | 클라우드 서버 |
| Communication Layer | MQTT/HTTP 기반 실시간 데이터 교환 | 인터넷 |
- AI‑FML: 퍼지 규칙과 멤버십 함수를 XML 형태로 기술해 로봇과 클라우드 간 규칙 업데이트를 용이하게 함.
- DNN 모델: 음성 인식·발음 평가에 특화된 CNN‑RNN 하이브리드 구조를 사용, 클라우드에서 대규모 학습 데이터로 사전 학습 후 API 형태 제공.
3. 실험 설계 및 결과
- 대상: 대만 초·중학생 120명, 일본 대학생 30명 (다국적 검증)
- 조건: 전통 교실 학습 vs. AI‑FML 로봇 협동 학습
- 주요 지표:
- 학습 성취도(시험 점수 상승률) → 평균 12% 상승
- 학습 몰입도(자기 보고 설문) → 1.8점(5점 척도) 상승
- 시스템 반응 시간 → 평균 350 ms (실시간 피드백 가능)
- 결과 해석: 로봇이 제공하는 즉각적인 퍼지 기반 피드백과 클라우드 DNN의 정밀 분석이 학습자의 인지 부하를 감소시키고, 자기조절 학습을 촉진함을 확인.
4. 강점
- 멀티‑레벨 지능 통합: 인식·인지·계산 지능을 계층적으로 결합해 퍼지 규칙과 딥러닝을 보완.
- 실시간 협동 학습: 로봇이 현장에 존재함으로써 인간‑기계 공동 학습 환경을 구현.
- 플랫폼 독립성: AI‑FML 규격을 사용해 로봇 하드웨어와 클라우드 서비스 간 인터페이스를 표준화, 다른 로봇(예: NAO, Pepper)에도 적용 가능.
5. 한계 및 개선점
| 구분 | 내용 | 제언 |
|---|---|---|
| 데이터 편향 | 실험에 사용된 데이터가 영어 말·듣기 중심, 다른 언어·문화에 대한 일반화 어려움 | 다언어·다문화 데이터셋 구축 |
| 클라우드 의존성 | 인터넷 연결 불안정 시 계산 에이전트 기능 저하 | 엣지 컴퓨팅 기반 경량 DNN 모델 배포 |
| 퍼지 규칙 설계 | 전문가 주관에 의존, 규칙 수가 늘어나면 관리 복잡도 증가 | 자동 규칙 학습(퍼지 강화학습) 도입 |
| 사용자 경험 | 로봇 Kebbi Air의 물리적 디자인이 학습자에게 친숙하지 않을 수 있음 | 인간공학적 디자인 및 감성 로봇 요소 추가 |
6. 향후 연구 방향
- 지속적 학습(Continual Learning): 클라우드 DNN이 새로운 학습 행동 데이터를 실시간으로 업데이트하도록 설계.
- 멀티모달 통합: 눈동자 추적, 피부 전도도 등 정서·생리 신호를 추가해 학습 상태를 다차원으로 모델링.
- 교육 정책 연계: 온톨로지를 국가 교육 데이터베이스와 연동해 맞춤형 교육과정 설계에 활용.
- 오픈소스 생태계: AI‑FML 규격과 로봇 제어 코드를 오픈소스로 공개해 학계·산업계 협업 촉진.
7. 결론
본 논문은 퍼지 로직(AI‑FML)과 딥러닝을 결합한 로봇 기반 학습 행동 온톨로지 시스템을 제안하고, 실제 교육 현장에서 인간‑기계 협동 학습 모델의 효과를 실증하였다. 기술적 혁신과 교육적 파급 효과가 크지만, 데이터 다양성, 클라우드 의존성, 규칙 관리 등의 과제가 남아 있다. 이러한 한계를 극복한다면 차세대 스마트 교육 인프라의 핵심 구성 요소로 자리매김할 가능성이 높다.