로컬 CA 시뮬레이션을 통한 수백만 개의 6 상태 FSSP 솔루션 탐색
이 논문은 셀룰러 오토마타의 정보 인코딩을 변환하는 '로컬 시뮬레이션' 개념을 활용하여, 최소 시간(2n-2)과 최소 상태(6개)를 가지는 FSSP(화재 부대 동기화 문제) 솔루션을 대량 생성하는 방법을 제시한다. 1987년 Mazoyer가 제안한 단일 솔루션과 2018년 클러스터로 발견된 718개 솔루션에서 출발하여, 단일 개인용 컴퓨터만으로 수백만 개의 새로운 6-상태 솔루션을 생성할 수 있음을 보여준다.
저자: - **Clergue, C.** - **Verel, S.** - **Formenti
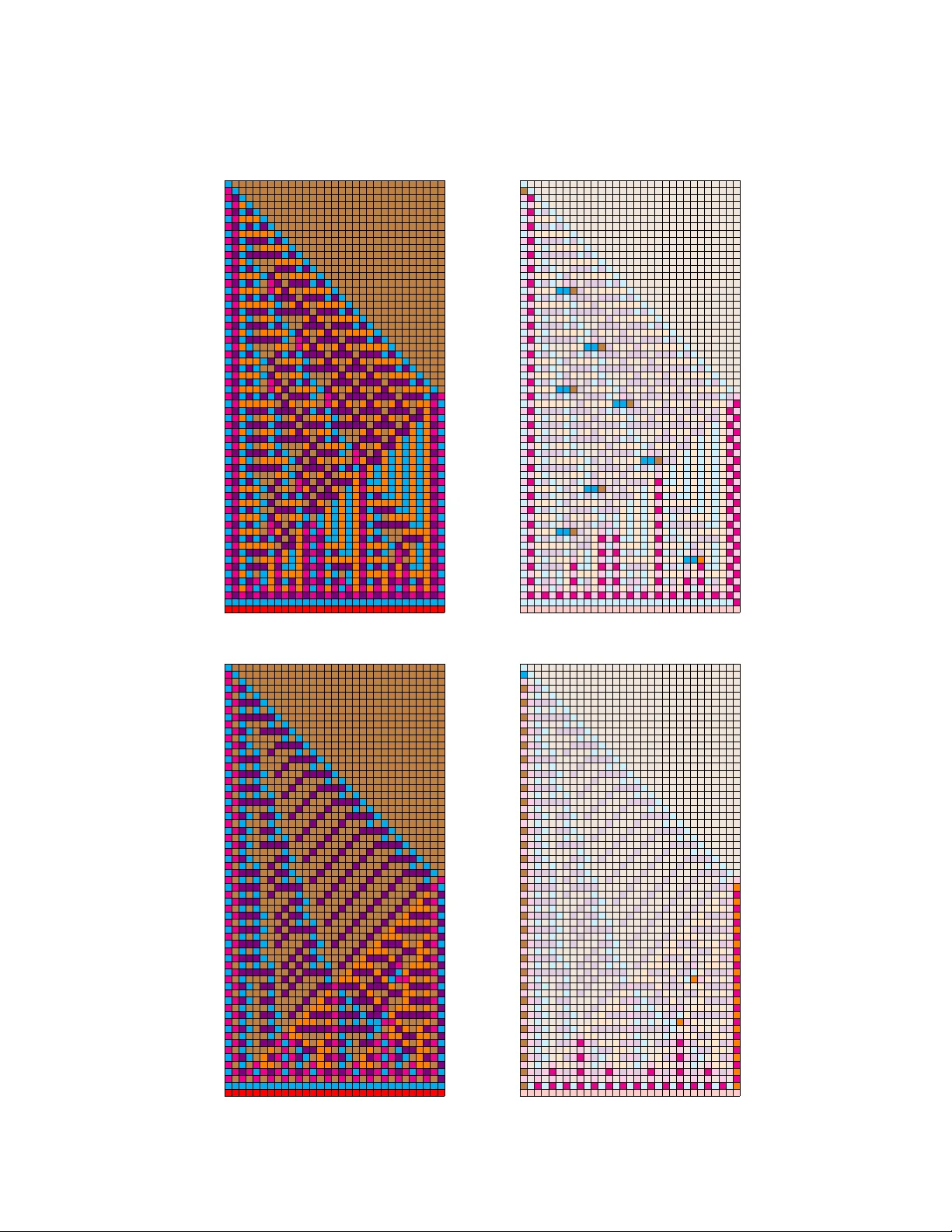
이 논문은 셀룰러 오토마타(CA)의 핵심 문제 중 하나인 FSSP(화재 부대 동기화 문제)의 최소 상태(6개) 솔루션을 대규모로 탐색하는 새로운 방법론을 제시한다. FSSP는 왼쪽 끝의 '일반' 상태 셀 하나와 오른쪽의 '정지' 상태 셀들로 이루어진 임의 길이의 배열에서, 모든 셀이 정확히 같은 시간에 처음으로 '발사' 상태로 전환되도록 하는 CA를 찾는 문제이다. 이때 동기화 시간의 이론적 하한은 2n-2이다.
연구의 출발점은 1987년 Mazoyer가 발견한 유일무이한 6-상태 최소 시간 솔루션과, 2018년 Clergue 등이 클러스터 컴퓨팅과 지역 탐색 알고리즘으로 추가 발견한 718개 솔루션이다. 본 논문의 목표는 '로컬 시뮬레이션'이라는 형식적 도구를 이용해 이 솔루션들로부터 파생될 수 있는 솔루션의 풀을 탐색하는 것이다.
논문의 본론은 다음과 같이 구성된다. 먼저, CA, 시공간 다이어그램 패밀리, 로컬 매핑, 로컬 시뮬레이션을 엄밀하게 정의한다. 로컬 매핑 h는 원본 CA α의 상태를 새로운 상태 집합 S로 변환하는 함수로, 초기 상태 변환 함수 h_z와 국소 전환 변환 함수 h_s로 이루어진다. 이 변환이 결정론적인 새로운 CA β를 생성하면 h를 α에서 β로의 로컬 시뮬레이션이라 한다.
핵심 기여는 세 가지 알고리즘적 정리와 그 적용에 있다.
1. **수퍼 로컬 전환 테이블:** CA α의 모든 실행에서 나타날 수 있는 특정 패턴(초기 3셀, 또는 연속된 두 시간에서의 5셀과 결과 3셀)을 미리 추출한 테이블 Δα를 정의한다. 이를 통해 어떤 로컬 매핑 h에 대해서도, h가 생성할 새 CA β의 국소 전환 관계 δβ를 α의 다이어그램을 재실행하지 않고도 Δα와 h만으로 직접 계산할 수 있다.
2. **FSSP-호환성의 간소화된 검증:** 로컬 시뮬레이션 h가 생성한 β가 FSSP 솔루션이 되기 위한 필요충분조건이 h가 'FSSP-호환적(FSSP-compliant)'이어야 함을 증명한다. 이는 h가 α의 특수 상태(?, G, Q, F)를 β의 대응 상태로 올바르게 매핑하고, 정지 상태의 동작을 보존하는 등 몇 가지 직관적인 조건을 의미한다. β의 무한한 시공간 다이어그램을 검증할 필요가 사라진다.
3. **탐색 알고리즘:** 기존 6-상태 솔루션 α를 시작점으로, 고정된 상태 집합 S(크기 7, 특수 상태 4개와 일반 상태 A,B,C 3개)에 대한 모든 FSSP-호환적 로컬 매핑의 공간을 그래프로 모델링한다. 각 노드는 하나의 로컬 매핑이며, 에지는 단 하나의 h_s 함수값만 다른 '이웃' 매핑을 의미한다. 상태의 순열(비트)을 고려하여 동형 솔루션을 중복 탐색하지 않도록 한다. 이 그래프에서 체계적 탐색(예: 최선-노력-완전 탐색)을 수행하여 수백만 개의 새로운 6-상태 솔루션을 생성한다.
실험적으로, Mazoyer 솔루션과 718개 솔루션 중 하나를 시드로 사용하여 단일 컴퓨터로 이러한 탐색을 수행했으며, 그 결과 방대한 수의 새로운 솔루션을 얻을 수 있었다. 이는 6-상태 FSSP 솔루션의 풀이 극도로 풍부하며, 로컬 시뮬레이션 그래프가 이를 탐색하는 데 매우 효율적인 구조임을 보여준다. 논문은 이 방법론이 다른 CA 최소화 문제나 솔루션 공간의 체계적 분류에 적용될 수 있는 미래 연구 방향을 제시하며 마무리된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기