3차원 축평행 박스 환경에서 지오데식 스패너 설계
초록
본 논문은 축평행 직육면체 형태의 장애물들 사이에 놓인 3차원 점 집합에 대해, L₂ 거리 기준으로 8√3 이하의 팽창비와 O(n log³ n)개의 간선만을 갖는 지오데식 스패너가 존재함을 증명한다. 핵심 아이디어는 L₁ 거리에서 8‑스패너를 만든 뒤, L₁과 L₂ 사이의 상수 변환을 이용해 최종 비율을 얻는 것이다.
상세 분석
스패너는 원래 메트릭 공간의 거리와 그래프 내 최단거리 사이에 상수 t(=스패닝 비율)를 보장하는 희소 그래프이다. 여기서 메트릭은 장애물을 피한 최단 경로, 즉 지오데식 거리이다. 일반적인 유클리드 공간에서는 (1+ε)‑스패너를 O(n) 간선으로 만들 수 있지만, 장애물이 존재하면 거리 구조가 크게 변한다. 논문은 먼저 모든 거리를 L₁(맨해튼) 노름으로 측정하면 L₂와 √3 배 차이만 존재한다는 사실(Observation 1)을 이용해 분석을 단순화한다.
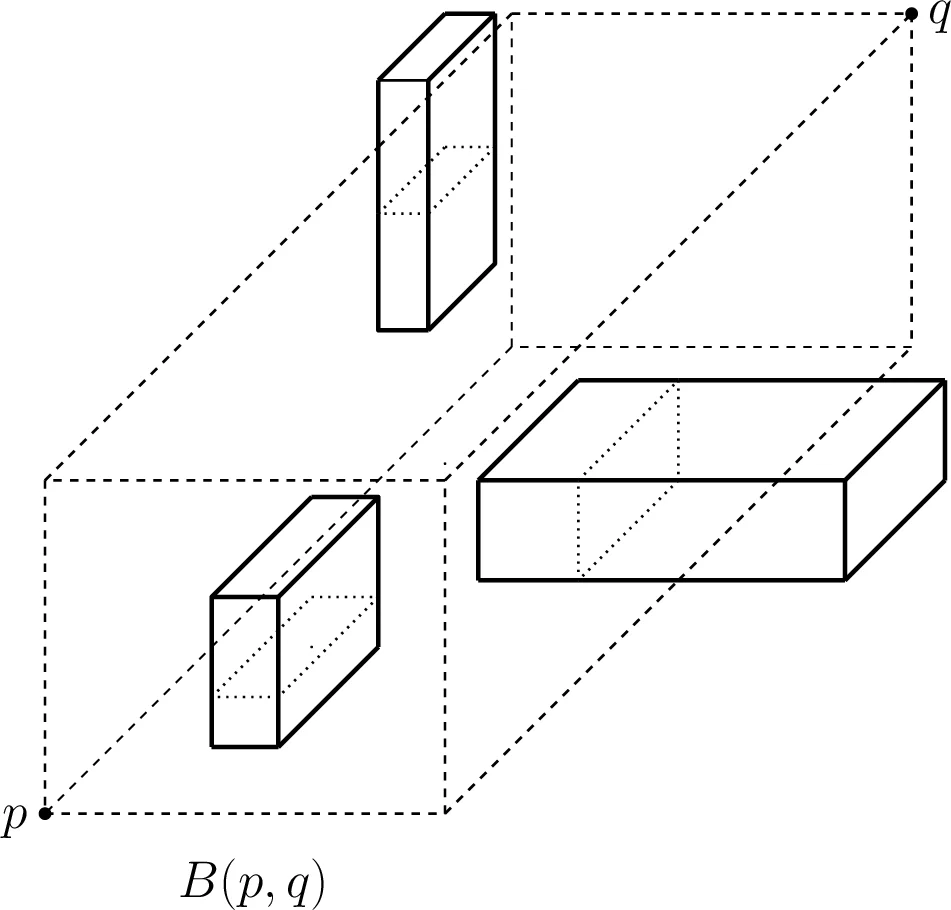
다음으로 저자는 L₁ 거리에서 8‑스패너를 구성한다. 핵심은 Lemma 2로, 임의의 두 점 p, q와 B(p,q) 내부의 점 o에 대해 σ(p,o)+σ(o,q) ≤ 4·σ(p,q) 를 보인다. 여기서 σ는 장애물을 피한 L₁ 지오데식 거리이며, 증명은 p‑q 사이 최단경로 g 위에 적절한 중간점 r을 찾아 삼각 부등식을 적용한다. 2‑차원에서는 상수가 3으로 더 강해지지만, 3‑차원에서는 4가 최적이다.
스패너 구축을 위해서는 Cone‑Separated Pair Decomposition(CSPD)라는 구조를 활용한다. 3차원에서 4개의 정규 원뿔(각각 xy, xz, yz 평면을 기준으로 위쪽에 위치)을 정의하고, 각 원뿔에 대해 점 집합을 두 부분 A, B로 쪼개는 쌍들을 O(n log³ n) 개만큼 생성한다(Abam·de Berg의 결과). 각 쌍 (A,B)마다 원뿔의 중심 o와 그가 포함된 장애물의 여섯 면(±x, ±y, ±z) 위에 있는 대표점을 선택하고, A∪B 내에서 해당 대표점에 가장 가까운 점 r을 찾는다. 그 후 r과 A∪B의 모든 점을 연결하면 각 쌍당 O(|A|+|B|)개의 간선이 추가된다. 전체 간선 수는 4개의 원뿔에 대해 Σ(|A|+|B|)=O(n log³ n) 이므로 최종 그래프는 O(n log³ n) 간선을 가진다.
스패닝 비율 분석에서는 p∈A, q∈B라면 위에서 정의한 o와 그 면 중 하나(oₓ⁺ 등)가 B(p,q) 안에 놓임을 보이고, 그 면 위의 대표점 r이 p와 q 사이의 경로를 8배 이내로 대체한다. 구체적으로 d_G(p,q) ≤ σ(p,r)+σ(r,q) ≤ 2·(σ(p,oₓ⁺)+σ(oₓ⁺,q)) ≤ 8·σ(p,q) 가 성립한다. 마지막으로 L₁에서 얻은 8‑스패너에 √3을 곱해 L₂ 거리 기준의 8√3‑스패너를 얻는다(Theorem 1).
이 결과는 축평행 박스라는 제한된 형태의 장애물에 대해 최초로 3차원 지오데식 스패너를 제공한다는 점에서 의미가 크다. 기존 연구는 2차원 직사각형 영역이나 폴리곤 지형, 혹은 α‑fat 형태의 장애물에 한정돼 있었으며, 일반적인 3차원 장애물에 대한 스패너는 알려지지 않았다. 논문은 또한 스패너의 간선 수를 O(n polylog n) 수준으로 유지하면서도 상수 팽창비를 달성했다는 점에서 실용적이다. 그러나 간선 수가 O(n log³ n)으로 아직 최적이라 할 수 없으며, 더 작은 상수 팽창비(예: 2‑3 수준)와 O(n log n) 혹은 O(n) 간선 수를 동시에 만족하는 스패너는 남은 과제로 남는다. 또한 현재 구성은 장애물 내부에 있는 Steiner 점을 허용하지 않으며, 장애물 수가 매우 많아져도 간선 수가 독립적인 점도 흥미롭다.
댓글 및 학술 토론
Loading comments...
의견 남기기