공중 배터리 교체로 멀티로터 비행시간 5배 연장
본 논문은 메인 쿼드콥터 위에 부착된 도킹 플랫폼에 작은 ‘비행 배터리’ 쿼드콥터가 착륙·연결해 전원을 교체하는 방식을 제안한다. 전용 전기 회로와 무동력 기계식 도킹 구조를 이용해 비행 중 배터리를 교체함으로써, 메인 기체의 비행 시간을 단일 배터리 사용 시보다 4.7배, 이론적 한계 대비 2.2배 연장한다.
저자: Karan P. Jain, Mark W. Mueller
본 논문은 멀티로터 드론의 비행시간을 연장하기 위한 새로운 접근법으로, ‘공중 배터리 교체(Flying Battery)’ 개념을 제시한다. 메인 쿼드콥터는 기본 배터리를 장착하고 상단에 도킹 플랫폼을 부착한다. 별도로 설계된 소형 쿼드콥터가 보조 배터리를 탑재하고, 도킹 다리를 이용해 메인 기체의 플랫폼에 정밀히 착륙한다. 착륙 시 전기 커넥터가 맞물려 전원 전송이 이루어지며, 전용 스위칭 회로를 통해 주 배터리와 보조 배터리 사이를 무중단으로 전환한다.
논문은 먼저 배터리 질량‑에너지 관계를 수식화하여, 배터리 질량 비율 \(φ\) 가 전체 질량의 약 2/3일 때 비행시간이 최대가 된다는 기존 이론을 제시한다. 그러나 이 지점에서는 구조적 제약과 안전 문제가 발생하므로, 배터리 질량을 무한히 늘리는 방식은 실용적이지 않다. 이를 극복하기 위해 저자는 배터리를 ‘교체 가능한’ 형태로 만들고, 비행 중에 교체함으로써 배터리 질량 한계를 회피한다.
도킹 메커니즘은 무동력 기계식 설계에 기반한다. 메인 기체 상단에 평평한 플랫폼과 스프링‑로드 전기 커넥터를 설치하고, 비행 배터리 측에 착륙 다리와 구리 플레이트를 부착한다. 이 구조는 수직 정렬을 유지하면서도 약간의 측면 여유를 허용해 충격 흡수와 진동에 강하도록 설계되었다. 도킹 시 전기 접점이 정확히 맞닿아 전류가 흐르며, 별도의 액추에이터가 필요 없으므로 무게 증가가 최소화된다.
전기 회로 설계에서는 두 배터리를 직접 병렬 연결하면 전압 차이로 역전류가 발생할 위험이 있음을 지적한다. 이를 방지하기 위해 각 배터리 라인에 저전압 강하 스마트 바이패스 다이오드를 삽입하고, 주 배터리 회로에 정상 폐쇄형 릴레이를 배치한다. 릴레이는 보조 배터리 전압에 연결된 MOSFET을 통해 제어되며, 보조 배터리가 없을 경우 릴레이가 열리지 않도록 안전 로직을 구현한다. 이렇게 하면 전압 차이가 큰 상황에서도 전원 전환이 매끄럽게 이루어진다.
공기역학적 분석에서는 두 기체가 수직으로 정렬될 때 발생하는 다운워시 간섭을 고려한다. 기존 연구에 따르면 하부 기체가 받는 교란이 주된 문제이며, 상부 기체는 거의 영향을 받지 않는다. 따라서 비행 배터리를 메인 기체 위에서 접근하도록 설계하고, 수직 힘을 보상하기 위해 피드포워드 thrust map을 사전 실험으로 구축한다. 이 맵은 두 기체 간 거리와 높이에 따라 추가 thrust 값을 제공해, 도킹 중 발생하는 다운워시 압력을 상쇄한다.
실험 구성은 다음과 같다. 메인 쿼드콥터는 820 g 무게에 3S 2.2 Ah 리포 배터리를 탑재하고, 비행 배터리는 320 g 무게에 2S 0.8 Ah 전용 배터리와 3S 1.5 Ah 보조 배터리를 장착한다. 두 기체는 모션 캡처 시스템과 온보드 자이로를 이용해 위치를 정확히 추적하고, 전압·전류 센서를 통해 전력 흐름을 기록한다. 제어는 계층형 PID 위치·자세 제어기로 구현되며, 메인 기체에는 비행 배터리와의 상대 위치에 기반한 피드포워드 thrust가 추가된다.
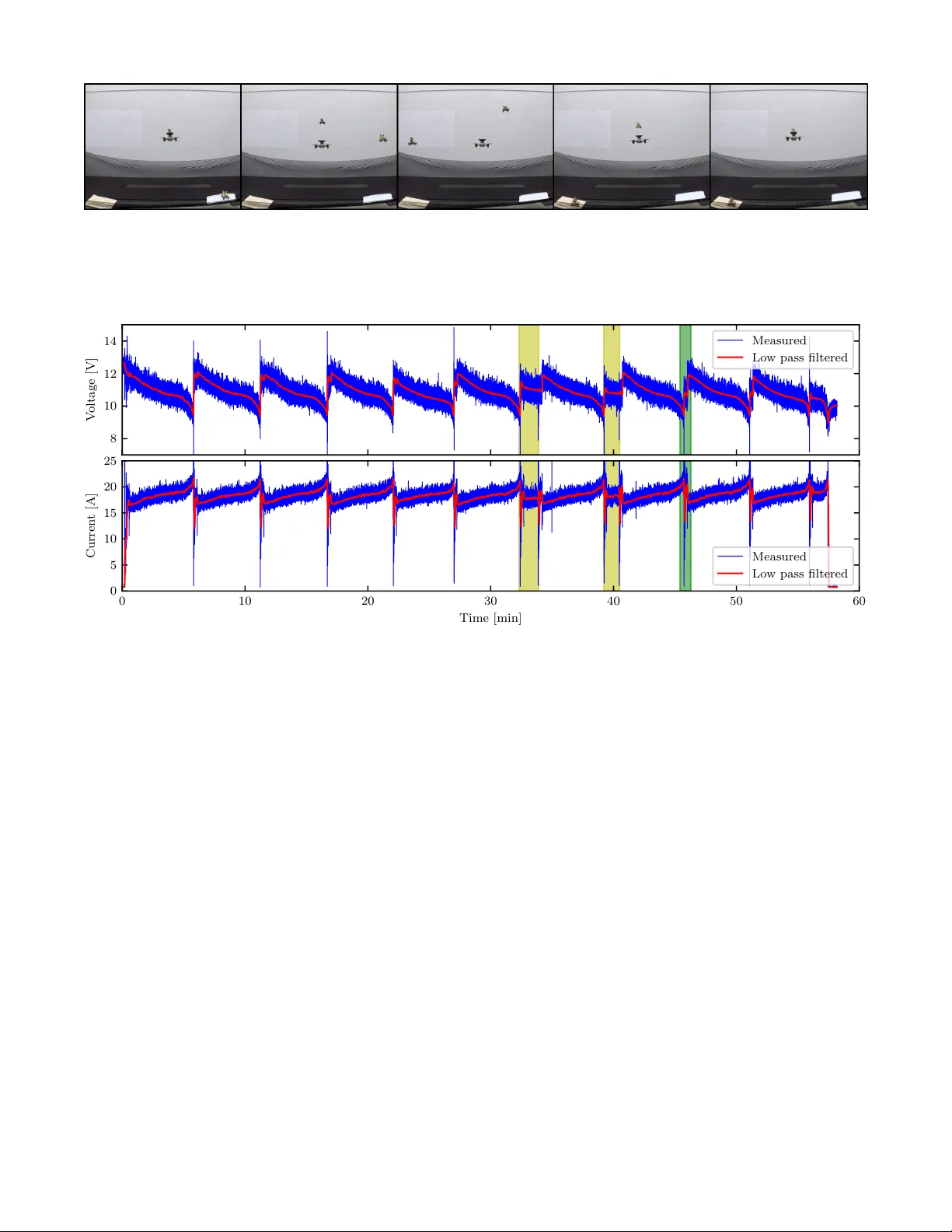
실험 절차는 (1) 비행 배터리를 메인 기체 위 30 cm 고도에서 하강시켜 도킹, (2) 보조 배터리 전원으로 전환, (3) 보조 배터리가 방전될 때 비행 배터리를 언도킹하고 새 배터리를 띄워 다시 도킹, (4) 위 과정을 여러 차례 반복하는 형태이다. 도킹에 평균 20–25 s, 언도킹 및 재도킹에 약 8 s가 소요되었다. 결과적으로 메인 기체는 주 배터리를 거의 사용하지 않고 보조 배터리만으로 연속 비행을 수행했으며, 단일 배터리 비행시간 대비 4.7배(약 14 분)까지 연장되었다. 이는 동일 기체가 배터리 질량을 2/3 이상 늘렸을 때 기대되는 이론적 최대 비행시간(≈6 분)을 크게 초과한다.
논문의 의의는 비행 중 배터리 교체가 가능함을 실증함으로써, 지상 충전 스테이션에 의존하지 않는 연속 비행이 가능해졌다는 점이다. 이는 도시 항공 모빌리티, 장거리 정찰, 재난 현장 모니터링 등에서 임무 중단 없이 에너지 보급이 필요한 상황에 적용될 수 있다. 다만 현재는 배터리 교체가 수동으로 이루어지고, 고속·다중 도킹을 위한 자동화와 충돌 방지 알고리즘, 배터리 관리 시스템(BMS) 통합 등이 향후 연구 과제로 남아 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기