센서 드리프트 적응을 위한 컨텍스트 기반 학습
초록
본 논문은 금속산화물 가스 센서의 장기적인 드리프트 현상을 자연의 후각 시스템이 환경 변화를 학습하듯이, “컨텍스트+스킬” 신경망 구조를 통해 자동으로 보정하는 방법을 제안한다. 기존 SVM 앙상블에 비해 딥러닝 기반 스킬 모델과 컨텍스트 모델을 결합함으로써 배치 간 시간 차이가 클수록 성능이 급격히 떨어지는 문제를 완화하고, 실제 산업용 데이터셋에서 향상된 정확도를 입증한다.
상세 분석
이 연구는 센서 드리프트라는 비정상적인 비정상(non‑stationary) 현상을 다루기 위해 두 가지 핵심 아이디어를 도입한다. 첫 번째는 전통적인 SVM 기반 앙상블을 딥러닝 기반 스킬 네트워크로 대체함으로써 표현력과 학습 효율을 높인 점이다. 스킬 네트워크는 128 차원의 센서 피처를 입력으로 받아 50‑유닛의 “스킬” 레이어와 20‑유닛의 “결정” 레이어를 거쳐 5‑클래스(가스 종류) 확률을 출력한다. 교차 엔트로피 손실과 SGD‑momentum(학습률 1e‑3, 모멘텀 0.9)으로 200 epoch 학습하며, 가중치 초기화는 레이어 규모에 역비례하는 분산의 가우시안으로 설정해 과적합을 방지한다. 두 번째 핵심은 “컨텍스트” 모듈이다. 이는 이전 배치에서 라벨이 있는 샘플들을 순차적으로 입력받는 단순 RNN(또는 LSTM) 구조로, 현재 배치의 입력과 결합되어 최종 예측에 영향을 미친다. 컨텍스트는 배치 간 드리프트 패턴을 시간적 특징으로 압축해 스킬 레이어에 전달함으로써, 배치 T‑1의 정확도가 높은 모델이 배치 T에서도 높은 성능을 유지하도록 돕는다.
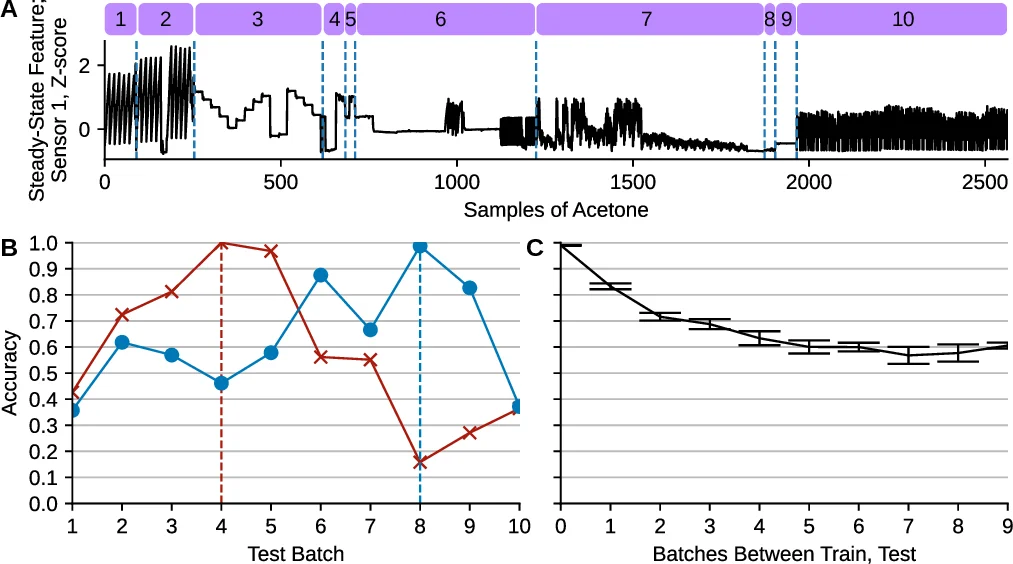
실험은 Vergara 등(2017)이 공개한 36개월에 걸친 10개의 배치, 6가지 가스, 128 차원 피처를 포함하는 데이터셋을 사용한다. 데이터 전처리 단계에서 결측이 많은 toluene 클래스를 제외하고, 모든 피처를 z‑스코어 정규화하였다. SVM 앙상블은 RBF 커널, 10‑fold 교차 검증을 통해 C와 γ를 최적화했으며, 각 배치마다 별도 모델을 학습하고 이전 배치 정확도를 가중치 β로 사용해 가중합 예측을 수행한다.
성능 비교 결과, 순수 스킬 NN은 SVM 앙상블보다 평균 3~5% 높은 정확도를 보였으며, 컨텍스트+스킬 NN은 특히 배치 간 간격이 큰 경우(예: 배치 1 → 배치 8)에서 정확도 저하를 현저히 억제했다. 이는 컨텍스트가 드리프트의 시간적 흐름을 모델링함으로써 “예측 가능한 변동”을 사전에 학습했기 때문이다. 또한 LSTM보다 단순 RNN이 충분히 좋은 결과를 보인 점은 컨텍스트 시퀀스가 짧고(최대 9 단계) 복잡한 장기 의존성을 요구하지 않기 때문으로 해석된다.
이 논문은 두 가지 중요한 시사점을 제공한다. 첫째, 센서 드리프트와 같은 비정상적 데이터 변화를 다룰 때, 배치 간 연속성을 무시하고 한 번에 학습하는 전통적 방법보다 시계열 컨텍스트를 명시적으로 모델링하는 것이 효과적이다. 둘째, 자연의 후각 시스템이 상위 피질에서 하위 후각구까지 피드백을 활용해 배경 냄새와 변화를 보정하는 메커니즘을 인공 신경망에 적용함으로써, 실제 산업 현장에서 재보정 비용을 크게 절감할 수 있는 실용적 솔루션을 제시한다. 향후 연구에서는 컨텍스트 모듈에 어텐션 메커니즘을 도입하거나, 멀티모달(온도·습도 등) 정보를 함께 학습함으로써 더욱 견고한 드리프트 보정 시스템을 구축할 여지가 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기