반복학습 MPC를 위한 작업 분해 기법
본 논문은 기존에 수행된 작업 T₁의 상태‑입력 데이터를 활용해 새로운 작업 T₂에 대한 안전한 초기 궤적을 자동으로 생성하는 방법을 제안한다. 작업을 여러 서브태스크로 분해하고, 서브태스크 전이 지점에서만 1‑step 제어 가능성을 검증함으로써 복잡도를 크게 낮춘다. 제안된 TDMPC 알고리즘은 ILMPC의 안전 집합을 구성하고, 이로부터 얻은 정책이 T₂에 대해 언제나 실행 가능함을 보이며, 초기화 방법에 비해 반복 비용을 감소시킨다. 자율…
저자: Charlott Vallon, Francesco Borrelli
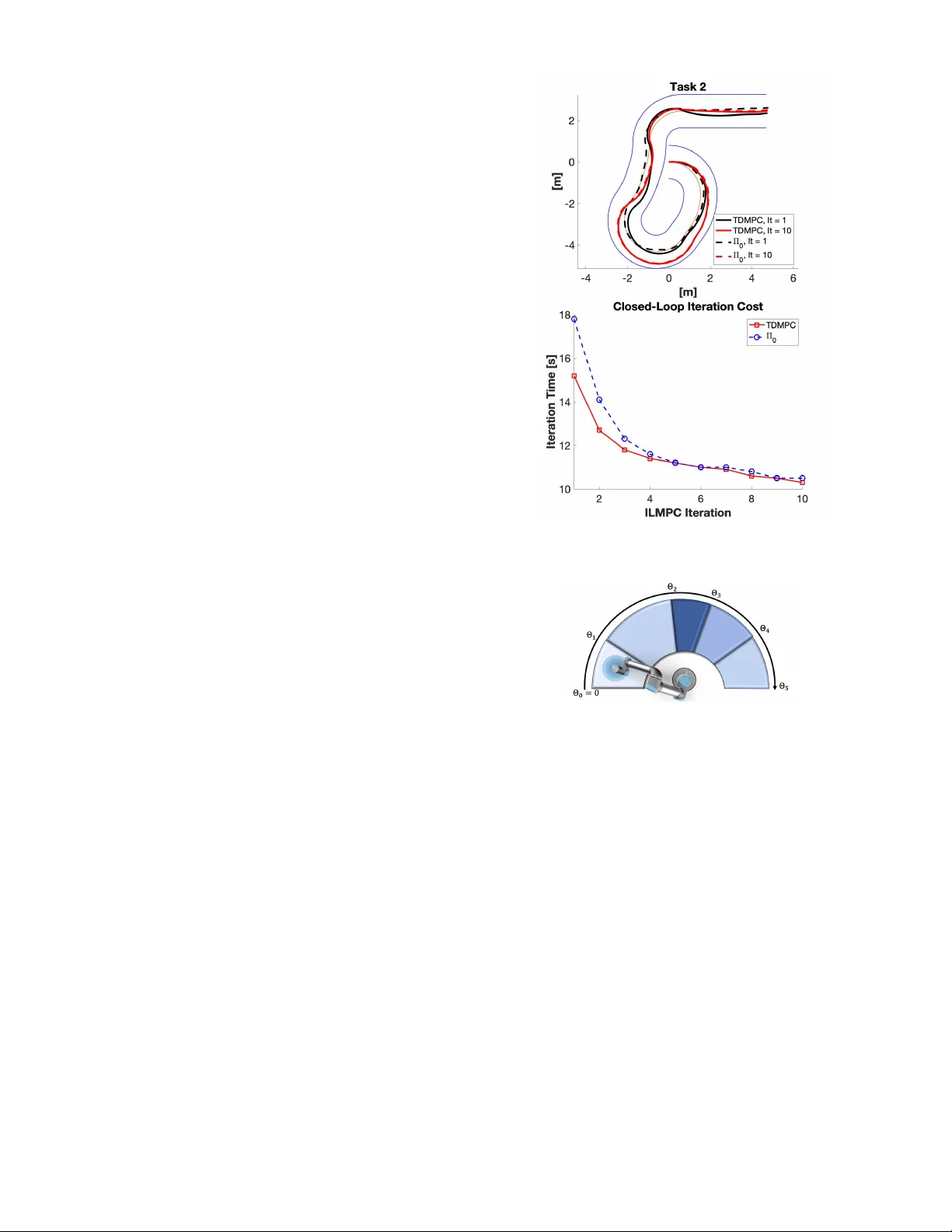
본 논문은 반복학습 모델예측제어(Iterative Learning Model Predictive Control, ILMPC)의 초기화 문제를 해결하기 위해 작업 분해(task decomposition) 방법을 제안한다. 연구 배경으로는 ILMPC가 반복 수행되는 동일 작업에 대해 과거 실행 데이터를 활용해 성능을 점진적으로 향상시키지만, 새로운 작업 T₂가 등장하면 최소 하나의 안전한 초기 궤적이 필요하다는 점을 들었다. 기존 방법들은 새로운 작업에 대해 전체 궤적을 설계하거나, 매 단계마다 저장된 궤적을 검증·보간하는 방식으로 복잡도가 높았다.
저자들은 이러한 한계를 극복하기 위해 “서브태스크(subtask)”라는 개념을 도입한다. 서브태스크 S_i는 작업 공간 X_i, 입력 공간 U_i, 그리고 다음 서브태스크로 전이되는 상태 집합 R_i 로 구성된다. 작업 T는 이러한 서브태스크들의 순서화된 집합 {S₁,…,S_M} 로 표현된다. 중요한 가정은 T₁과 T₂가 동일한 서브태스크 집합을 서로 다른 순서로 배열한다는 점이다. 즉, T₁ = {S₁,…,S_M}, T₂ = {S_{l₁},…,S_{l_M}}이며
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기