대화형 인공지능으로 원격 로봇의 정신 모델 향상
초록
본 논문은 원격 로봇 운영자가 로봇의 기능과 제한을 정확히 이해하도록 돕기 위해 대화형 인공지능 비서 MIRIAM을 제안한다. 자연어 기반의 설명과 상황 알림을 제공함으로써 투명성을 높이고, 운영자의 정신 모델을 정량적으로 평가한다. 실험 결과, MIRIAM의 설명이 기능적·구조적 이해를 모두 향상시켰으며, 향후 사회적 단서와 이론‑마인드 기반 인터랙션을 통해 신뢰와 채택을 더욱 증진시킬 방안을 논의한다.
상세 분석
이 연구는 원격 로봇이 복합적인 작업을 수행해야 하는 고위험 환경(핵시설, 해양 플랜트 등)에서 운영자의 정신 모델이 불명확할 경우 발생할 수 있는 신뢰 붕괴와 작업 효율 저하 문제를 지적한다. 기존 설계자는 로봇의 내부 구조와 의사결정 과정을 완전히 파악하지만, 실제 운영자는 시스템을 단순히 움직이는 점(dot)으로 인식해 기능과 제한을 오해하기 쉽다. 논문은 이러한 격차를 메우기 위해 ‘대화형 인공지능 비서’를 매개체로 삼는 접근법을 제시한다.
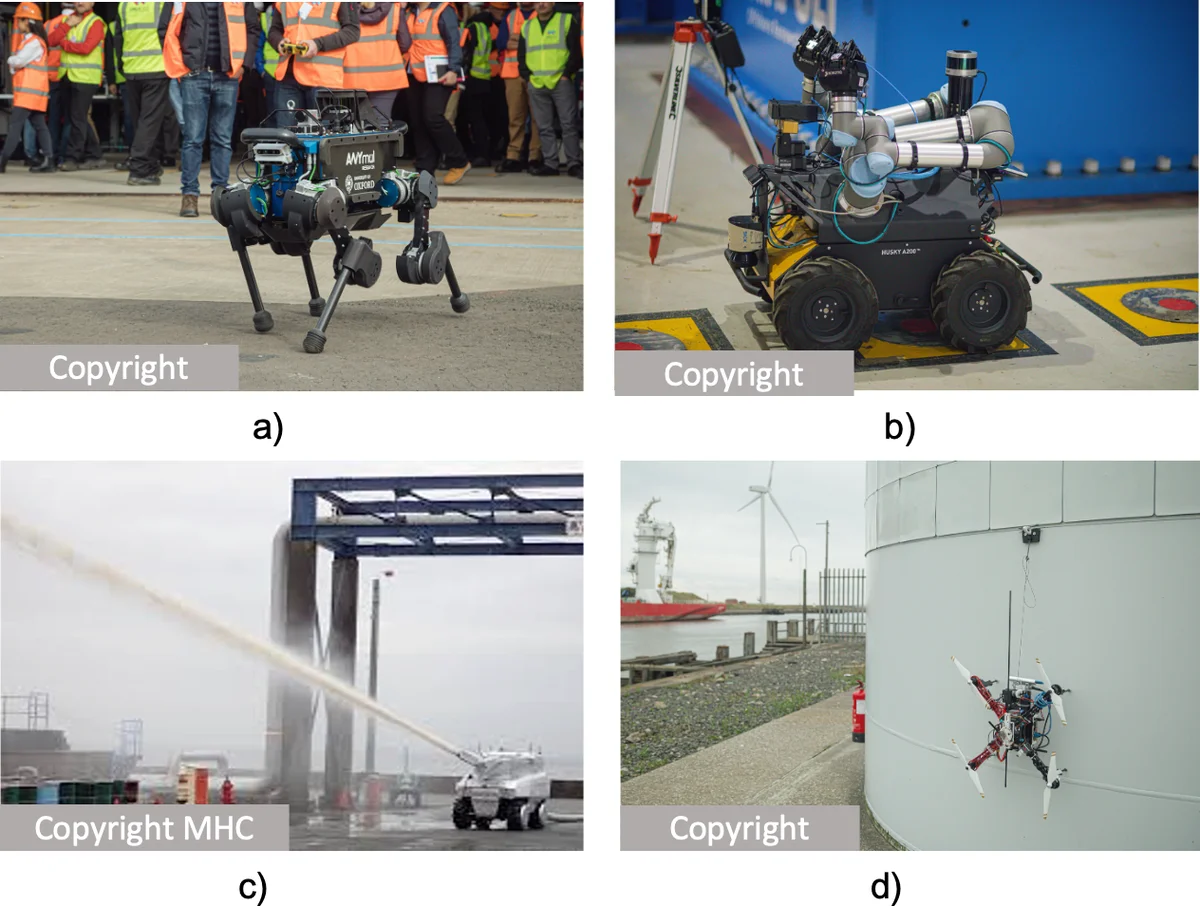
MIRIAM은 멀티모달 채팅·음성 인터페이스로, 여러 종류의 자율 차량(드론, 지상·수중 로봇)으로부터 상태 업데이트와 경고를 수집하고, 이를 자연어로 재구성해 운영자에게 전달한다. 핵심 기술은 (1) 로봇의 현재 능력(배터리 수준, 센서 가용성 등)을 실시간으로 파악하는 동적 세계 모델, (2) 사용자의 질의 의도를 해석하고 적절한 설명 스타일을 선택하는 대화 관리 모듈, (3) 설명의 기능적(‘무엇을 하는가’)과 구조적(‘어떻게 동작하는가’) 측면을 동시에 제공하는 설명 생성 엔진이다.
실험에서는 MIRIAM이 제공한 설명이 운영자의 정신 모델 점수를 통계적으로 유의하게 향상시켰으며, 특히 설명 내용의 양과 전달 방식이 시간에 따라 정신 모델의 진화에 큰 영향을 미쳤음을 확인했다. 이는 단순히 정보를 나열하는 것이 아니라, 상황에 맞는 적절한 양의 정보를 제공해야 함을 시사한다. 또한, 사전 연구에서 제시된 ‘사회적 단서(시선, 표정, 억양)’를 로봇에 적용하면 인간-인간 대화와 유사한 효율성을 얻을 수 있다는 가설을 제시한다.
한계점으로는 정신 모델을 정량화하는 설문 방식이 주관적일 수 있고, 실험 환경이 제한된 오프쇼어 시나리오에 국한돼 있어 일반화에 주의가 필요하다. 향후 연구에서는 사용자의 사전 지식 수준을 자동으로 추정하고, 이론‑마인드 기반의 개인화된 피드백을 제공하는 메커니즘을 개발할 계획이다.
댓글 및 학술 토론
Loading comments...
의견 남기기