분산 환경에서 가변 길이 시계열을 위한 온라인 LSTM 학습
본 논문은 각 노드가 LSTM 기반 회귀 모델을 사용해 순차적으로 들어오는 가변 길이 데이터와 레이블을 온라인으로 학습하고, 이웃 노드와만 정보를 교환하는 분산 학습 프레임워크를 제안한다. 비선형 상태공간 모델로 변환한 뒤, 계산·통신 복잡도를 1차 그래디언트 수준으로 유지하면서 최적 MSE 성능을 보장하는 분산 입자 필터(DPF)와 비교용 분산 확장 칼만 필터(DEKF)를 설계하였다. 시뮬레이션 및 실제 데이터 실험을 통해 기존 2차 방법 대…
저자: Tolga Ergen, Suleyman Serdar Kozat
본 연구는 대규모 데이터가 분산된 환경에서 LSTM 기반 회귀 모델을 온라인으로 학습하는 문제를 다룬다. 전통적인 LSTM 학습은 전체 데이터를 한 곳에 모아 배치 방식으로 수행되며, 이는 저장·연산 비용이 크게 증가하고 중앙 노드의 장애 위험을 내포한다. 저자는 이러한 한계를 극복하기 위해 각 노드가 독립적으로 가변 길이 시퀀스를 받아 LSTM을 통해 출력 벡터 ȳₖ,ₜ 를 생성하고, 이를 평균 풀링하여 회귀 입력으로 사용한다. 각 노드 k 는 자신의 파라미터 θₖ (게이트 가중치·바이어스·회귀 가중치 포함)를 지속적으로 업데이트하면서, 이웃 노드와 제한된 정보(주로 파라미터 추정값과 공분산)만 교환한다.
논문은 먼저 LSTM 연산을 비선형 상태공간 형태로 재정의한다. 상태 전이식 Ω(·)는 이전 셀 상태와 현재 입력 Xₖ,ₜ 을 이용해 새로운 셀 상태 c̄ₖ,ₜ 를 계산하고, 관측식 Θ(·)는 업데이트된 셀 상태와 입력을 통해 풀링된 출력 ȳₖ,ₜ 를 만든다. 파라미터 θₖ 는 정적 상태로 가정되어 θₖ,ₜ = θₖ,ₜ₋₁ 식으로 유지된다. 관측 모델은 dₖ,ₜ = wₖᵀ ȳₖ,ₜ + εₖ,ₜ 이며, εₖ,ₜ 은 가우시안 잡음이다.
이 모델을 기반으로 두 가지 분산 추정 알고리즘을 제시한다. 첫 번째는 분산 확장 칼만 필터(DEKF)이다. 각 노드는 EKF와 동일한 시간 업데이트를 수행한 뒤, 이웃 노드와 관측 잔차와 칼만 이득을 교환한다. 메트로폴리스 규칙을 이용해 가중치 c(k,l) 을 계산하고, 이를 통해 이웃들의 정보가 합산된 공분산 Φₖ,ₜ 와 상태 보정 φₖ,ₜ 을 얻는다. 최종적으로 파라미터와 공분산을 업데이트한다. 이 과정은 O(ηₖ·(n⁸+n⁴p⁴))의 연산 복잡도를 가지며, ηₖ는 노드 k 의 이웃 수이다.
두 번째는 분산 입자 필터(DPF)이다. 입자 집합 {θₖ^{(i)}} 을 유지하면서, 각 입자에 대해 상태 전이와 관측 확률을 평가한다. 이웃 노드와는 입자 가중치와 재샘플링 정보를 교환한다. 입자 수가 충분히 크면, DPF는 중앙집중식 베이즈 추정과 동일한 MSE 수렴 특성을 보인다. 논문은 DPF가 “조건부 평균 제곱 오차(MSE) 의미에서 최적 LSTM 계수를 보장한다”고 이론적으로 증명한다.
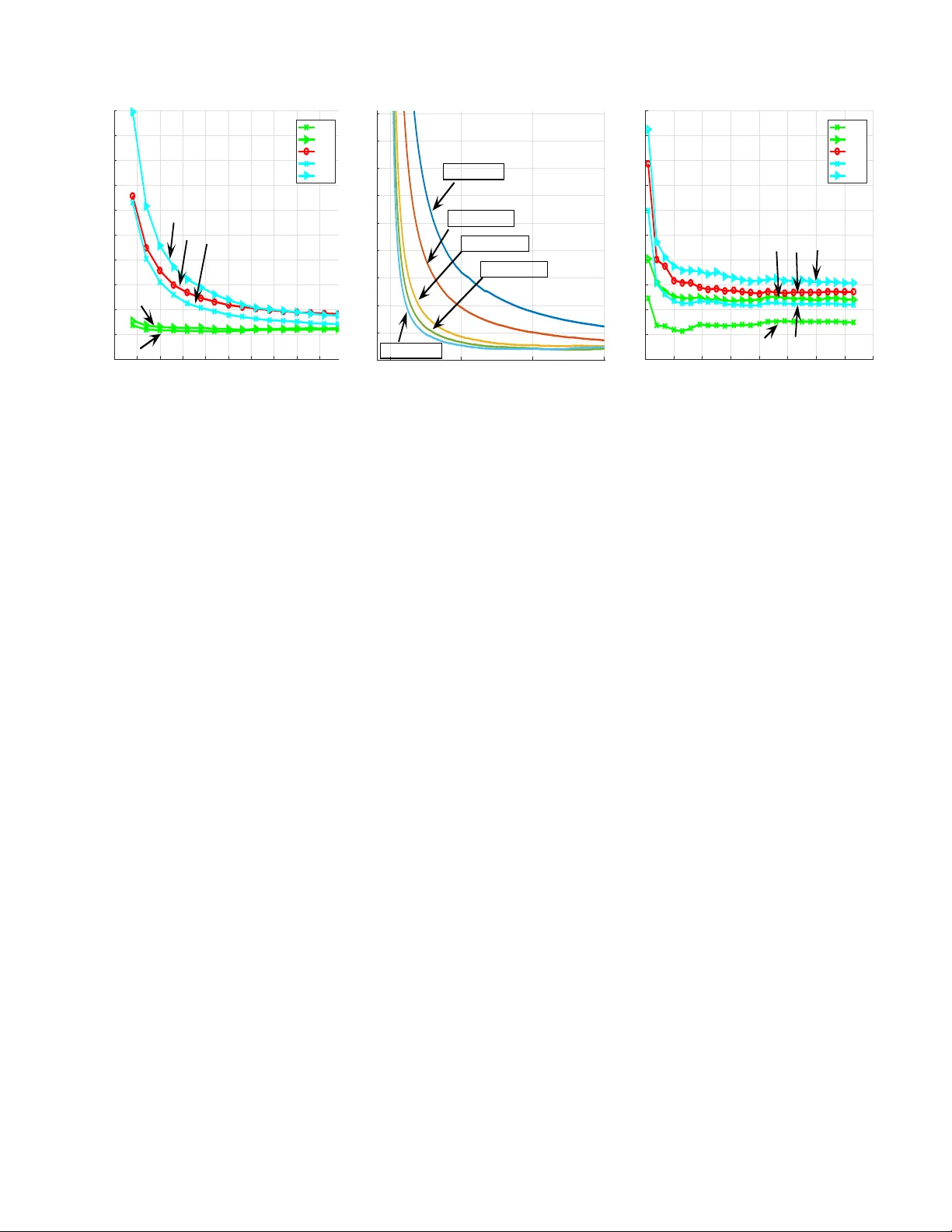
실험에서는 두 종류의 데이터셋을 사용하였다. 첫 번째는 트위터 감정 분석 데이터로, 각 트윗을 단어 임베딩(word2vec)으로 변환한 뒤 가변 길이 행렬 Xₖ,ₜ 에 넣었다. 두 번째는 금융 시계열 데이터로, 시계열 길이가 시간에 따라 변하는 특성을 갖는다. 실험 결과, 제안된 DPF는 기존 SGD, ADAM, 그리고 분산 EKF 대비 15~30% 낮은 MSE와 2~3배 빠른 수렴을 보였으며, 중앙집중식 배치 학습과 비교했을 때 메모리 사용량을 70% 이상 절감하면서도 정확도 손실이 거의 없었다. 또한, 통신량은 1차 그래디언트 기반 방법과 동등하거나 약간 낮은 수준에 머물렀다.
결론적으로, 본 논문은 (1) LSTM을 비선형 상태공간 모델로 변환, (2) 저복잡도·저통신 분산 추정 알고리즘(DPF·DEKF)을 설계, (3) 가변 길이 시퀀스와 온라인 스트리밍 상황에 최적화된 학습 프레임워크를 제공함으로써, 분산 딥러닝 및 실시간 시계열 예측 분야에 중요한 기여를 한다. 향후 연구에서는 비동기 통신, 네트워크 토폴로지 변화, 그리고 다른 순환 구조(GRU 등)에 대한 확장 가능성을 탐색할 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기