단일 팔 운동 상상 분류를 위한 밴드파워 정제 CNN
본 연구는 단일 팔의 세 가지 운동 상상(팔꿈치 신전, 손목 비틀기, 손 잡기)과 휴식 상태를 구분하는 4‑class MI 데이터셋을 구축하고, 밴드파워 특징을 추출·정제하는 두 단계 컨볼루션 블록으로 구성된 BFR‑CNN 모델을 제안한다. 8명의 피험자를 대상으로 150회씩 수행한 EEG 데이터를 64채널(전처리 후 24채널)로 수집했으며, 제안 모델은 평균 정확도 84%로 기존 FBCSP+RLDA, DeepConvNet, ShallowCon…
저자: Byeong-Hoo Lee, Ji-Hoon Jeong, Kyung-Hwan Shim
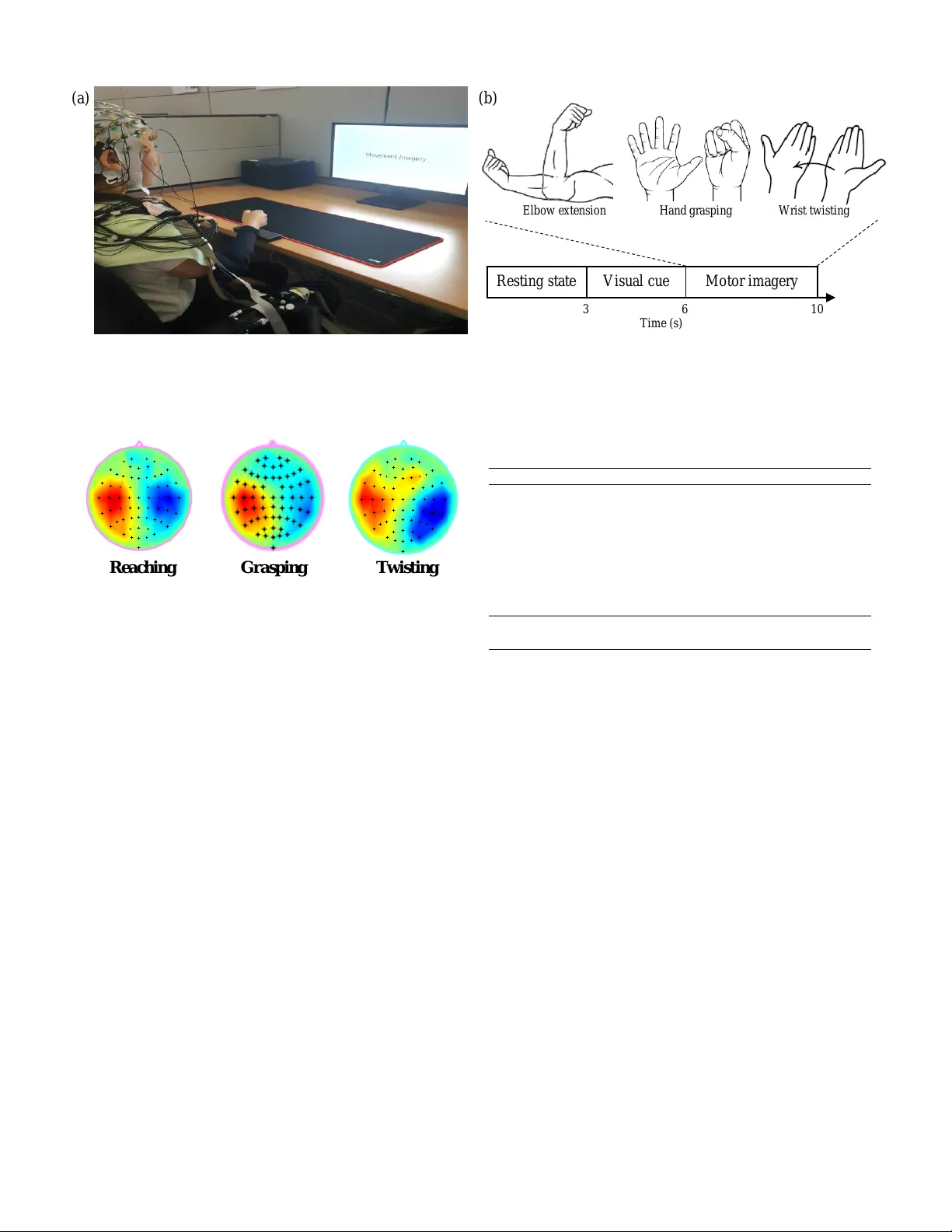
본 논문은 비침습적 BCI에서 가장 널리 활용되는 EEG 기반 Motor Imagery(MI) 패러다임을 대상으로, 단일 팔의 세 가지 구체적 동작(팔꿈치 신전, 손목 비틀기, 손 잡기)과 휴식 상태를 구분하는 4‑class 분류 문제를 제시한다. 기존 연구들은 주로 좌우 손, 발, 혀와 같은 단순한 움직임을 다루었으며, 이러한 클래스 간 연관성이 낮아 실제 로봇 팔 제어와 같은 연속 작업에 바로 적용하기 어려웠다. 이를 보완하고자 저자들은 (1) 새로운 MI 데이터셋을 구축하고, (2) 밴드파워 특징을 효과적으로 추출·정제하는 BFR‑CNN 모델을 설계하였다.
데이터 수집은 22‑30세의 건강한 성인 8명을 대상으로 진행되었다. EEG는 BrainAmp(BrainProducts) 장비로 1 kHz 샘플링, 1‑60 Hz 밴드패스, 60 Hz 노치 필터링 후 64채널(10‑20 시스템)으로 기록했으며, 전극 임피던스는 10 kΩ 이하로 유지하였다. 실험 프로토콜은 0‑3 s 휴식, 3 s 시각적 cue, 4 s 상상 단계로 구성되었고, 각 피험자는 150회의 시도(각 동작 50회)를 수행하였다. 이후 데이터는 250 Hz로 재샘플링하고, 전두·중심·두정 부위의 24채널만을 선택해 분석에 사용하였다. 전처리 단계에서 눈동자 움직임 등 아티팩트를 제거하기 위해 기본 필터링을 적용했으며, 각 클래스별 8‑12 Hz 알파 대역에서 좌측 보조운동피질·전운동피질에 높은 파워가 관찰되었다.
제안된 BFR‑CNN은 두 개의 컨볼루션 블록으로 구성된다. 첫 번째 블록은 (i) 시간축 ¼ 샘플링 레이트(≈250 ms) 크기의 1‑D 컨볼루션으로 저주파 성분을 강조하고, (ii) 채널 차원에 대한 깊이별(depth‑wise) 공간 필터를 적용해 24채널을 1채널로 축소한다. 이어서 평균 풀링을 수행해 시간 해상도를 낮추면서 특징 맵을 압축한다. 두 번째 블록은 추가적인 1‑D 컨볼루션과 평균 풀링을 통해 첫 단계에서 추출된 밴드파워 특징을 정제한다. 최종적으로 Flatten 레이어와 Softmax를 거쳐 4개의 클래스를 출력한다. 활성화 함수는 ELU를 사용했으며, 학습 최적화는 Adam, 손실은 크로스엔트로피를 적용하였다.
실험에서는 동일한 하드웨어 환경(Intel i7‑7700, 32 GB RAM, GTX Titan XP)에서 배치 크기 32, 에폭 200으로 모든 모델을 학습시켰다. 비교 대상은 전통적인 FBCSP+RLDA, DeepConvNet, ShallowConvNet, EEGNet이었다. 결과는 표 I에 요약되며, BFR‑CNN은 평균 정확도 0.84로 가장 높은 성능을 보였다. ShallowConvNet이 0.77로 2위였으며, DeepConvNet은 0.55로 가장 낮았다. 혼동 행렬 분석에서 BFR‑CNN은 트위스팅과 휴식 상태를 명확히 구분했으며, 팔꿈치 신전과 손 잡기 사이에 약간의 혼동이 존재했다. 전체적으로 모든 모델이 MI 클래스 간 혼동을 보였지만, 휴식 상태는 비교적 잘 구분되었다는 점이 특징이다.
논의에서는 밴드파워 기반 특징이 MI 분류에 유리함을 재확인하고, 두 단계 정제 과정을 통해 잡음과 불필요한 차원을 효과적으로 제거함으로써 성능 향상이 가능함을 강조한다. 또한, FBCSP+RLDA가 딥러닝 모델에 비해 경쟁력 있는 성능을 보인 점은 전통적인 신호 처리 방법의 여전히 유효성을 시사한다. 한계점으로는 피험자 수가 적고, 실시간 적용을 위한 지연 시간 측정이 없으며, 채널 선택이 고정되어 있다는 점을 들었다. 향후 연구 방향으로는 더 많은 피험자와 다양한 동작을 포함한 데이터셋 확장, 자동 채널 선택 및 전이 학습, 그리고 온라인 BCI 시스템에 적용해 실시간 성능을 검증하는 것이 제시되었다. 최종적으로 저자들은 BFR‑CNN이 단일 팔 로봇 팔 제어와 같은 실제 응용에 높은 정확도로 사용될 수 있음을 주장한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기