세 개의 착용형 센서만으로 하체 자세 추정하기
** 이 논문은 골반과 양쪽 경골에 부착된 3개의 IMU만을 이용해 보행 중 골반, 대퇴, 경골의 3차원 자세와 관절각을 실시간으로 추정하는 알고리즘을 제안한다. 제한된 칼만 필터(CKF)를 활용해 위치 드리프트를 억제하고, 골반‑무릎‑고관절의 기하학적 제약을 의사‑측정으로 삽입한다. 실험 결과, 평균 위치 오차 5.2 cm, 자세 오차 16.1°, 무릎·고관절 굴곡각 RMSE 각각 10.0°·9.9°를 달성하였다. **
저자: Luke Sy, Michael Raitor, Michael Del Rosario
**
본 논문은 착용형 관성 측정 장치(IMU)의 수를 최소화하면서도 보행 중 하체 전체의 3차원 자세와 관절각을 정확히 추정하는 새로운 알고리즘을 제안한다. 기존의 상용 시스템은 골반, 대퇴, 경골 각각에 센서를 부착해 총 5개의 IMU를 사용하거나, 복잡한 데이터‑드리븐 모델을 활용해 다수의 센서 데이터를 기반으로 자세를 복원한다. 그러나 센서 수가 많아질수록 착용 불편, 설치 시간 증가, 비용 상승 등의 문제가 발생한다. 이를 해결하고자 저자는 골반(천골)과 양쪽 경골, 총 3개의 IMU만을 이용하는 ‘Reduced Sensor Count(RSC)’ 구성을 채택하였다.
알고리즘의 핵심은 제한된 칼만 필터(Constrained Kalman Filter, CKF)이다. CKF는 일반적인 칼만 필터의 예측‑갱신 구조에 물리적 제약을 추가함으로써, 상태 추정이 인체의 해부학적 구조와 일치하도록 강제한다. 전체 흐름은 크게 세 단계로 나뉜다.
1. **예측 단계(Prediction)**
- 각 IMU에서 측정된 가속도와 각속도를 이용해 중력 보정 후 세계 좌표계에서의 선형 가속도를 얻는다.
- 이 가속도를 이중 적분해 골반과 양쪽 경골의 위치·속도를 예측한다. 여기서는 아직 관절 제약을 적용하지 않으므로, 예측된 위치가 실제 해부학적 연결 구조와 어긋날 수 있다.
2. **측정 단계(Measurement)**
- **Zero‑Velocity Update(ZVU)**: 발이 지면에 접촉했을 때 발목 속도를 0으로 강제하여 발목 위치를 재보정한다. 이는 발 착지 시점 검출(step detection)과 결합된 의사‑측정이다.
- **평면‑바닥 가정**: 발이 지면에 있을 때 발목의 높이를 0으로 설정한다.
- **골반 위치 의사‑측정**: 골반의 XY 위치를 두 발목 사이의 중점으로, Z 위치를 두 발목 높이의 평균(즉, 직립된 다리 길이)으로 가정한다. 이때 큰 공분산을 부여해 제약이 완전히 강제되지 않도록 한다.
- **공분산 제한기(Covariance Limiter)**: 골반과 발목 위치에 대한 공분산이 과도히 커지는 것을 방지하기 위해 고정된 공분산값을 삽입한다.
3. **제약 업데이트(Constraint Update)**
- **고관절 구형 관절**: 골반과 대퇴 사이가 구형 관절임을 가정한다.
- **무릎 힌지 관절**: 무릎은 한 축(굴곡‑신전)만을 허용하는 힌지 관절이며, 대퇴 축과 경골의 내측‑외측 축이 직교한다.
- **대퇴 길이 제약**: 골반‑무릎 거리(즉, 대퇴 길이)가 사전에 측정된 값과 일치하도록 한다.
- 위 세 제약은 비선형 방정식 형태이며, 각 시간 단계마다 선형화 후 의사‑측정 형태로 CKF에 삽입한다. 비선형 제약이 만족될 때까지 반복 적용한다.
이러한 구조를 통해 알고리즘은 매 순간마다 물리적으로 가능한 자세를 유지하면서도 센서 수를 최소화한다.
**실험 및 결과**
- **피험자**: 9명(남성 7명, 여성 2명), 평균 연령 24.6 ± 3.9 yr, 체중 63.0 ± 6.8 kg, 키 1.70 ± 0.06 m. 모두 정상 보행을 보이며, 골절·관절 질환 등 병력이 없었다.
- **실험 환경**: 4 × 4 m² 구역 내에서 광학 모션 캡처(OMC) 시스템을 이용해 ‘gold‑standard’ 데이터를 획득하고, 동일한 구간을 3개의 IMU로 기록하였다.
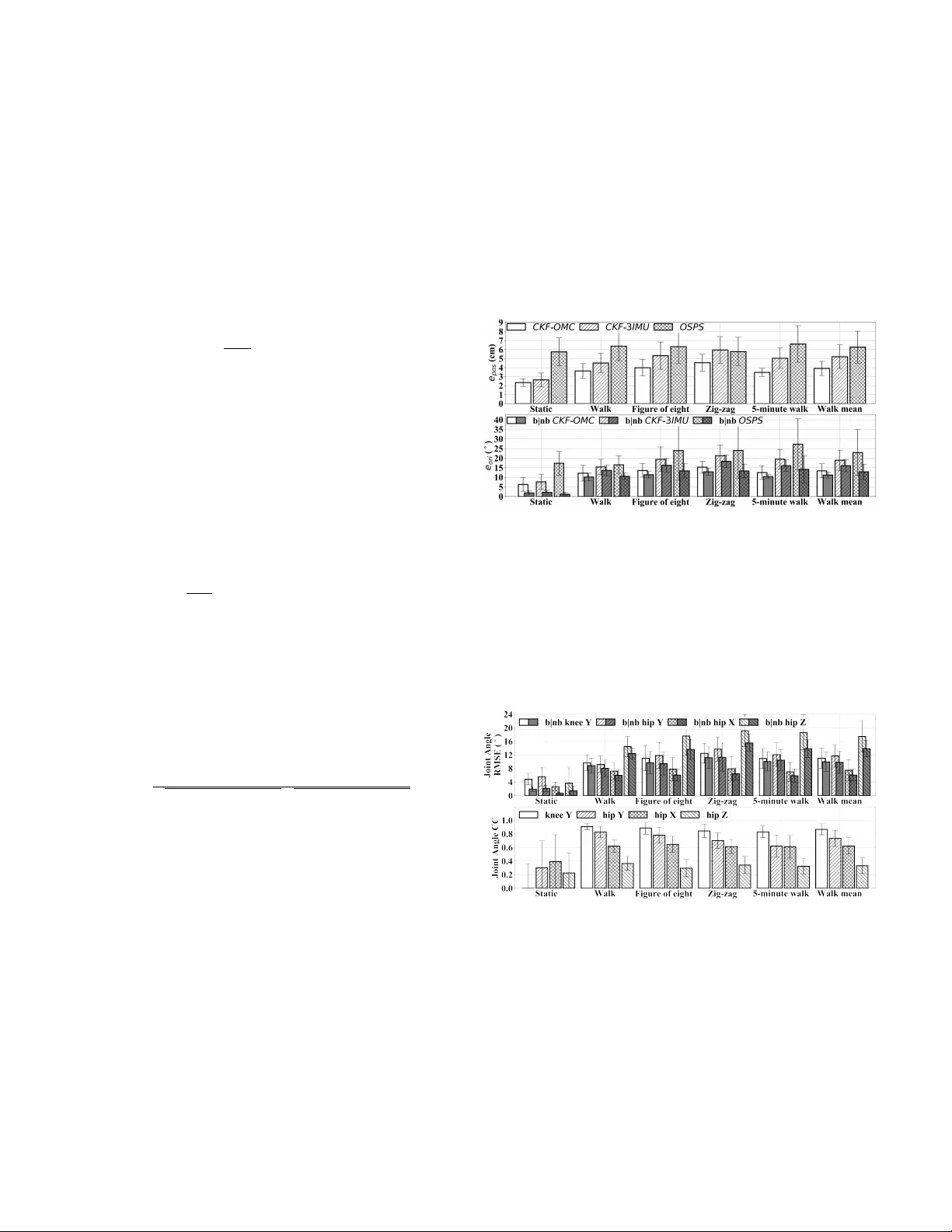
- **평가 지표**: 위치 RMSE, 자세(RMSE in degrees), 무릎·고관절 굴곡각 RMSE 및 상관계수(CC).
- **결과**:
- 위치 RMSE 5.21 ± 1.3 cm, 자세 RMSE 16.1 ± 3.2° (편향 없음).
- 무릎 굴곡각 RMSE 10.0 ± 2.9°, 고관절 굴곡각 RMSE 9.9 ± 3.2°.
- 무릎 CC 0.87 ± 0.08, 고관절 CC 0.74 ± 0.12.
- 실시간 처리 가능: 알고리즘은 일반적인 임베디드 프로세서에서도 초당 수십 Hz의 속도로 실행 가능하다.
**논의**
- **장점**: 센서 수 감소에 따른 착용 편의성, 비용 절감, 실시간 구현 가능성. CKF 기반이므로 잡음과 불확실성을 체계적으로 다룰 수 있다.
- **제한점**: 현재는 IMU의 자세 추정이 완벽하다고 가정하고 있어, 실제 센서 오리엔테이션 오류가 결과에 미치는 영향을 무시한다. 또한, 실험은 평지 보행에 한정되었으며, 비정상 보행(예: 보행 보조기 사용, 경사면 보행)에서는 제약 모델이 충분히 일반화되지 않을 수 있다. 피험자 수가 적고 연령·체형 다양성이 제한적이다.
- **향후 연구**: (1) IMU 자세 추정 오류 보정 및 적응형 노이즈 모델 도입, (2) 다양한 보행 패턴·병리학적 gait에 대한 검증, (3) 센서 배치 최적화 및 추가 최소 센서(예: 허리 혹은 무릎) 활용 가능성 탐색, (4) 장시간 자유 생활 환경에서의 데이터 수집 및 클라우드 기반 원격 모니터링 시스템 구축.
**결론**
제안된 CKF 기반 알고리즘은 3개의 착용형 IMU만으로도 골반·대퇴·경골의 3차원 자세와 주요 관절각을 실시간으로 정확히 추정한다. 평균 위치 오차 5 cm, 관절각 오차 10° 수준은 임상 및 일상 생활 모니터링에 충분히 활용 가능함을 보여준다. 저비용·고편의성 시스템으로 장기간 원격 보행 평가 및 실시간 보조기구 제어 등에 적용될 전망이다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기