신뢰 가능한 자율 시스템 인증을 위한 로드맵
초록
본 논문은 자율 시스템의 신뢰성을 검증·인증하기 위한 프레임워크를 제시하고, 현재 자동화 검증 기술과 규제 현황을 분석한다. 자율 수준·범위, 인증·규제의 관계를 정리하고, 3계층 모델(기능·행동·의도) 기반 인증 절차를 제안한다. 또한, 자율 로봇, 무인 항공기, 자율 주행차 등 7개 도메인 사례를 통해 적용 가능성을 보여준다. 마지막으로 연구자·엔지니어·규제당국에 대한 과제와 향후 연구 방향을 제시한다.
상세 분석
논문은 먼저 ‘자율성’과 ‘신뢰성’이라는 개념을 명확히 정의한다. 자율성은 SAE가 정의한 6단계(무자율~완전자율)를 확장해 ‘저자율·보조·부분·조건·고자율·완전자율’로 구분하고, 각각의 수준에 대해 ‘자율 범위(기능적 범위)’를 추가로 고려한다. 신뢰성은 요구사항 일관성·규칙 준수·예외 상황에서의 적절한 판단으로 정의되며, 윤리적·법적 책임은 인간에게 남는다고 명시한다.
다음으로 현재 규제·표준 환경을 살펴보면, IEC, ISO, IEEE 등 다수의 일반·특정 분야 표준이 존재하지만, 자율성·불확실성을 다루는 명시적 조항이 부족함을 지적한다. 특히, 기존 표준은 ‘문서 기반’ 요구사항에 머무르며, 형식적 사양·자동 검증 도구와의 연계가 미비하다.
핵심 제안은 3계층 프레임워크이다.
- 기능 계층 – 시스템이 제공해야 할 서비스와 안전 요구사항을 명세화한다. 여기서는 전통적인 기능 안전(FS)와 ISO 26262, IEC 61508 등을 활용한다.
- 행동 계층 – 실행 가능한 행동 집합과 전이 규칙을 모델링한다. 모델 검증(모델 체크), 정형 방법(예: TLA+, Alloy) 및 시뮬레이션 기반 테스트가 적용된다.
- 의도 계층 – 목표·신념·의도와 같은 내적 상태를 형식화한다. 이는 ‘의도 기반 인증’이라 불리며, BDI(신념‑목표‑의도) 모델이나 목표 논리(goal logic)를 이용해 의도 일관성을 검증한다.
각 계층마다 검증·인증 방법을 매핑하고, 계층 간 인터페이스를 정의함으로써 전체 시스템에 대한 종합적인 신뢰성 증명을 가능하게 한다. 또한, ‘검증 속성 도출 프로세스’를 제시해, 규제 요구사항 → 기능 명세 → 행동 모델 → 의도 모델 순으로 속성을 추출하고, 자동화 도구(예: SPIN, NuSMV, Coq)로 검증한다.
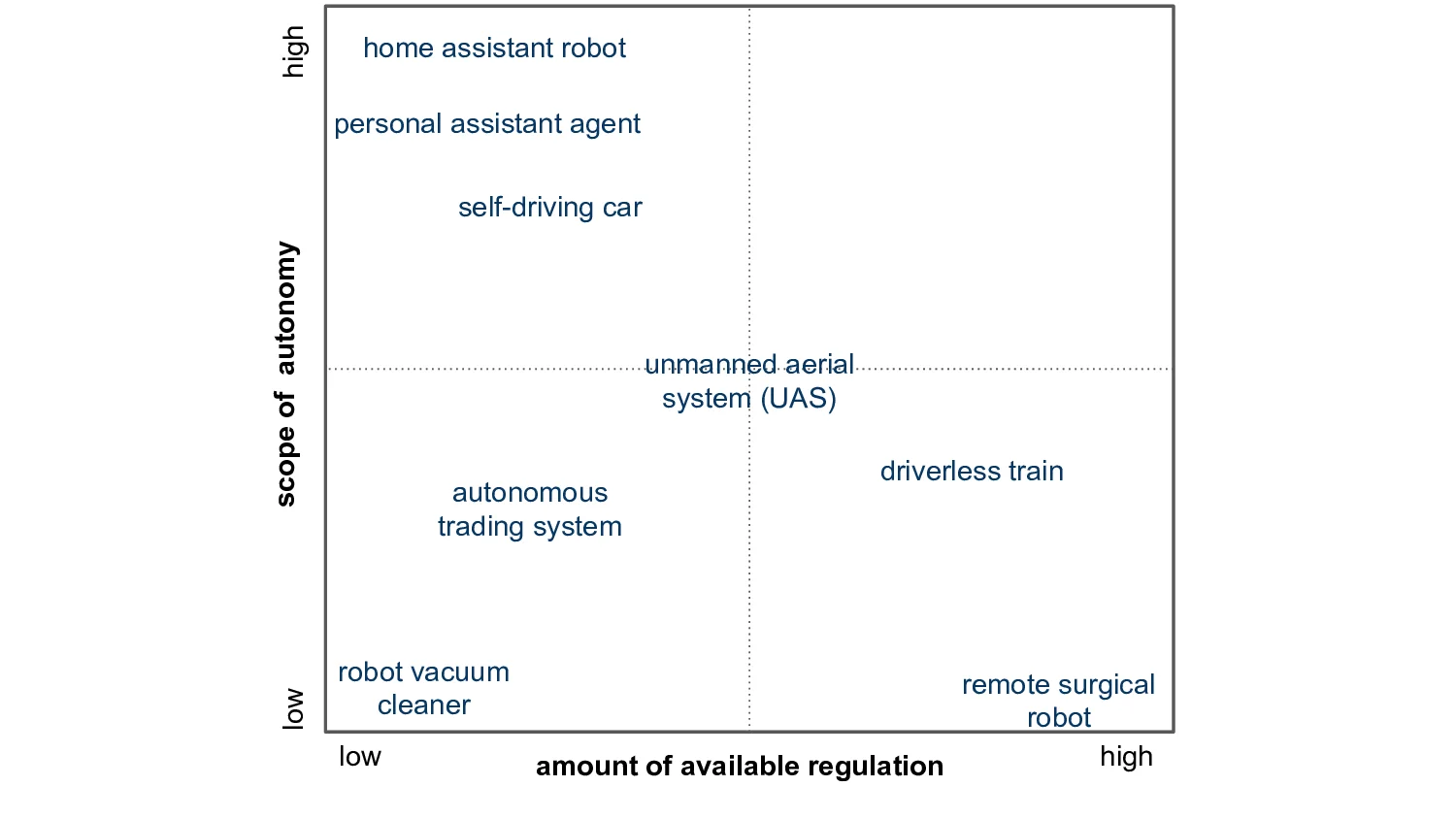
사례 연구에서는 가정용 로봇, 자율 주행차, 무인 항공기, 자동 거래 시스템, 개인 비서 에이전트, 원격 수술 로봇(자율 수준 제한) 등 7개 도메인을 분석한다. 각 도메인마다 기대되는 자율 수준과 현재 규제 강도를 매트릭스로 시각화하고, 프레임워크 적용 결과를 통해 필요한 표준 보완점과 검증 기술 격차를 도출한다.
마지막으로 연구·엔지니어·규제당국에 대한 과제를 제시한다. 연구 측면에서는 ‘의도 계층의 형식화’, ‘불확실성 모델링’, ‘런타임 검증’ 등이 남아 있다. 엔지니어는 ‘설계 단계에서의 형식적 사양 작성’과 ‘자동 검증 파이프라인 구축’이 필요하고, 규제당국은 ‘자율성 수준별 인증 기준’과 ‘표준과 형식적 사양의 연계’를 마련해야 한다.
전반적으로 논문은 자율 시스템 인증을 위한 체계적 접근법을 제시하고, 현재 표준·검증 기술의 한계를 명확히 하며, 실증 사례를 통해 실현 가능성을 보여준다.
댓글 및 학술 토론
Loading comments...
의견 남기기