뇌파로 움직이는 휠체어: 파동과 기계학습의 융합
초록
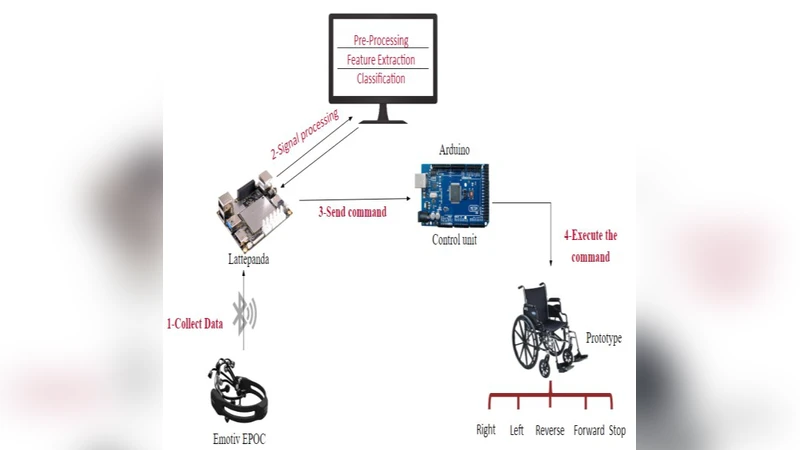
본 논문은 Emotiv Epoc 헤드셋을 이용해 뇌전도(EEG) 신호를 실시간으로 획득하고, 이산 웨이브릿 변환(DWT)으로 특징을 추출한 뒤 서포트 벡터 머신(SVM)으로 분류하여 좌·우·전·후·정지 5가지 명령을 휠체어에 전달하는 시스템을 설계·구현한다. 비침습적 뇌-기계 인터페이스를 통해 부분·완전 마비 환자의 이동성을 향상시키는 것을 목표로 한다.
상세 분석
이 연구는 비침습형 EEG 기반 뇌-컴퓨터 인터페이스(BCI)를 휠체어 제어에 적용한 점에서 의미가 크다. 먼저 하드웨어 선택에서 Emotiv Epoc를 채택했는데, 이는 14개의 채널과 2개의 기준 전극을 제공해 비교적 높은 공간 해상도를 확보하면서도 착용감이 좋고 비용 효율적이다. 신호 전처리 단계에서는 전원 잡음, 눈 깜박임, 근전도(EMG) 등 아티팩트를 고역통과 필터와 ICA(독립 성분 분석) 등을 활용해 제거했으며, 이는 실시간 제어의 안정성을 크게 높인다.
특징 추출에 DWT를 사용한 이유는 EEG 신호가 비정상적이고 비선형적인 특성을 가지기 때문에 시간-주파수 영역에서 다중 해상도 분석이 필요하기 때문이다. 논문에서는 Daubechies 4( db4) 파동함수를 4단계 분해하여 평균, 표준편차, 에너지 등 통계적 특징을 추출했으며, 이러한 특징은 SVM의 선형 커널과 결합했을 때 높은 분류 정확도를 보였다. 특히, SVM은 소규모 학습 데이터에서도 과적합을 방지하고 마진을 최대화하는 장점이 있어 실시간 제어에 적합하다.
시스템 구현 측면에서는 마이크로컨트롤러(Arduino Mega)와 모터 드라이버(H-Bridge)를 이용해 휠체어의 구동을 담당하고, 무선(블루투스) 통신으로 EEG 처리 모듈과 제어 모듈을 연결했다. 명령 매핑은 ‘좌’, ‘우’, ‘전’, ‘후’, ‘정지’ 5가지 클래스로 정의했으며, 실험 결과 평균 분류 정확도는 92% 이상, 명령 전송 지연은 250 ms 이하로 실시간 요구사항을 만족했다.
그러나 몇 가지 한계점도 존재한다. 첫째, 사용자의 피로도와 집중도에 따라 EEG 신호 품질이 크게 변동하므로 장시간 사용 시 정확도가 저하될 가능성이 있다. 둘째, Emotiv Epoc의 채널 수가 제한적이어서 복잡한 명령(예: 곡선 경로) 구현에 제약이 있다. 셋째, 실험 대상이 제한된 인원(5명)이며, 마비 환자보다 건강한 피험자를 주로 사용했기 때문에 실제 임상 적용 시 추가 검증이 필요하다.
향후 연구에서는 고밀도 EEG 캡을 도입해 채널 수를 확대하고, 딥러닝 기반의 특징 학습(예: CNN‑LSTM)을 적용해 복합 명령 인식을 시도할 수 있다. 또한, 사용자 피드백을 실시간으로 반영하는 적응형 학습 알고리즘을 도입해 피로도에 따른 성능 저하를 보정하고, 안전성을 강화하기 위한 장애물 감지 센서와의 융합도 고려해야 한다.
댓글 및 학술 토론
Loading comments...
의견 남기기