실시간 단일광자 라이다 3D 재구성을 위한 플러그인 앤 플레이 포인트 클라우드 디노이저
초록
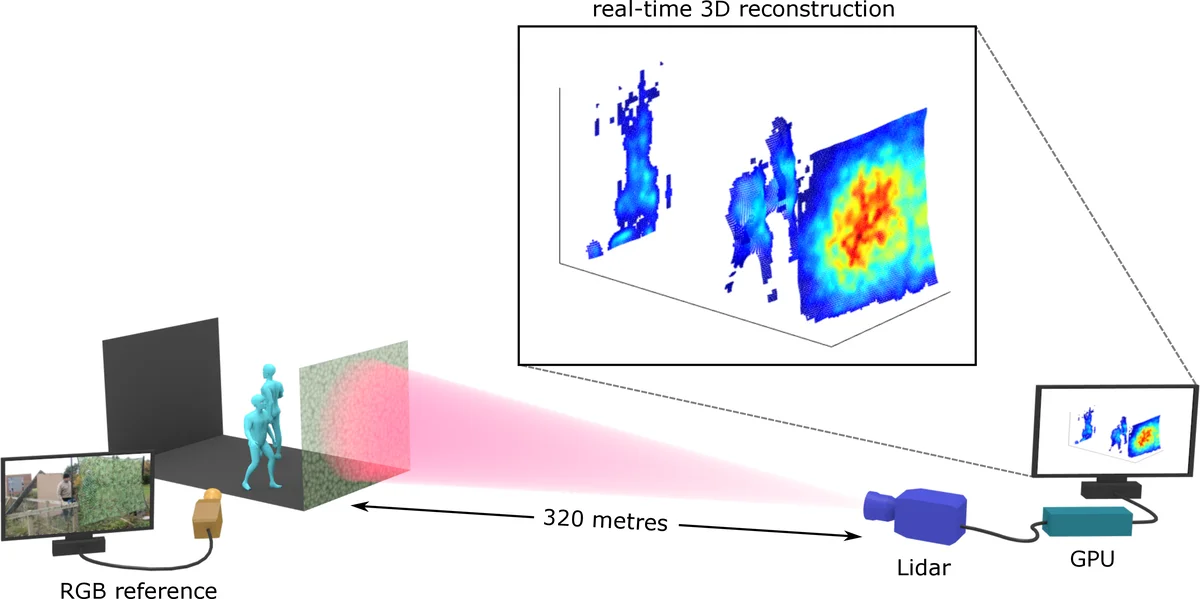
단일광자 라이다 데이터의 포아송 잡음과 다중 표면 존재 문제를 해결하기 위해, 관측 모델을 기반으로 한 그래디언트 단계와 컴퓨터 그래픽스에서 개발된 포인트 클라우드 디노이저(APSS)를 교차 적용하는 플러그인‑앤‑플레이 프레임워크를 제안한다. 이 방법은 20 ms 수준의 처리 시간으로 320 m 거리의 야외 장면을 50 fps 실시간으로 재구성하며, 기존 최첨단 기법 대비 10⁵ 배 빠른 속도와 동등하거나 우수한 정확도를 제공한다.
상세 분석
본 논문은 단일광자 라이다(TCSPC) 시스템이 야외에서 직면하는 두 가지 핵심 난제를 동시에 해결한다. 첫째, 포아송 잡음과 강한 일조 배경에 의해 매우 낮은 신호‑대‑배경 비율(SBR)에서도 정확한 깊이와 반사율 추정을 요구한다. 둘째, 한 픽셀에 다중 표면이 존재할 경우 전통적인 단일‑표면 가정이 깨져 기존의 교차‑상관이나 MCMC 기반 방법이 계산량 폭증 혹은 품질 저하를 겪는다. 저자들은 이러한 문제를 ‘플러그인‑앤‑플레이(PnP)’ 최적화 프레임워크에 통합한다.
관측 모델은 각 픽셀·시간 bin에 대해 포아송 확률분포를 가정하고, 신호와 배경을 선형 혼합한 형태로 수식화한다. 로그우도 함수를 데이터 적합도(term)로 사용하고, 깊이(t), 반사율(r), 배경(b) 세 변수에 대해 교대적으로 proximal gradient 업데이트를 수행한다. 여기서 핵심은 ‘proximal operator’를 전통적인 수학적 정규화 대신, 고성능 포인트 클라우드 디노이저에 위임한다는 점이다.
깊이 업데이트 단계에서는 현재 추정된 3D 포인트 집합 Φ에 대해 APSS(Algebraic Point Set Surfaces) 알고리즘을 적용한다. APSS는 각 점을 중심으로 구형 커널을 두고 로컬 다항식 근사를 수행해 부드러운 연속 면을 재구성한다. 이 과정은 픽셀 형식에 구애받지 않으며, 다중 표면이 겹쳐 있는 경우에도 각 표면을 독립적인 점군으로 취급해 동시에 정제한다.
반사율 업데이트는 깊이 정제 후 얻어진 Φ를 기반으로, 인접 이웃 간의 거리와 유사성을 이용한 저역통과 필터링(예: ISOMAP 기반)으로 수행한다. 여기서는 동일 표면 내의 점들만 상호작용하도록 설계돼, 표면 간 경계에서 발생할 수 있는 혼합 오류를 억제한다.
배경 업데이트는 라이다 시스템의 구조에 따라 두 가지 전략을 제시한다. 모노스태틱 스캔에서는 배경이 이미지 형태로 공간적 연관성을 갖기 때문에 FFT 기반 저역통과 필터를 적용한다. 반면, 바이스태틱 스캔에서는 배경이 독립적인 픽셀 잡음으로 간주돼 디노이징을 생략한다.
알고리즘 전체는 PALM(Parallel Alternating Linearized Minimization) 구조를 따르며, 각 단계가 GPU에서 완전 병렬화될 수 있도록 설계돼 있다. 실험 결과, 141×141 픽셀·4613 타임빈(0.3 mm 해상) 규모의 라이다 큐브를 13 ms에 처리해 96.6 %의 포인트를 4 cm 이하 오차로 복원했으며, 기존 ManiPoP(≈201 s)과 단일‑표면 방법(≈37 s)에 비해 10⁴ ~ 10⁵ 배 빠른 속도를 보였다. 또한 32×32 픽셀·153 타임빈(3.75 cm 해상) 배열을 20 ms 내에 처리해 50 fps 실시간 3D 비디오를 구현, 320 m 거리의 복잡한 인물·위장망 장면에서도 최대 3개의 표면을 정확히 복원했다.
핵심 기여는 (1) 관측 모델과 그래픽스 기반 디노이저를 결합한 PnP 프레임워크 제안, (2) 다중 표면을 자연스럽게 다루는 점군 기반 정규화, (3) GPU 친화적인 완전 병렬 구현을 통한 실시간 처리 가능성 입증이다. 이 접근법은 라이다 외에도 산란 매체에 의한 흐림 보정, 초고해상도 재구성 등 다양한 광학·영상 복원 문제에 확장 가능성을 시사한다.
댓글 및 학술 토론
Loading comments...
의견 남기기