제어 곱셈 잡음 시스템을 위한 딥 2FBSDE 제어기
본 논문은 제어 입력에 곱해지는 잡음(제어 곱셈 잡음)을 포함하는 비선형 확률 시스템의 최적 제어 문제를 풀기 위해, 2차 순방향‑역방향 확률 미분 방정식(2FBSDE)과 LSTM 기반 심층 신경망을 결합한 새로운 딥 학습 프레임워크를 제안한다. 제안 방법은 기존 FBSDE 기반 접근법이 겪는 누적 오차와 계산 복잡성을 극복하고, 고차원 로봇 및 생체역학 시스템에 대해 뛰어난 성능을 보인다.
저자: Marcus A Pereira, Ziyi Wang, Tianrong Chen
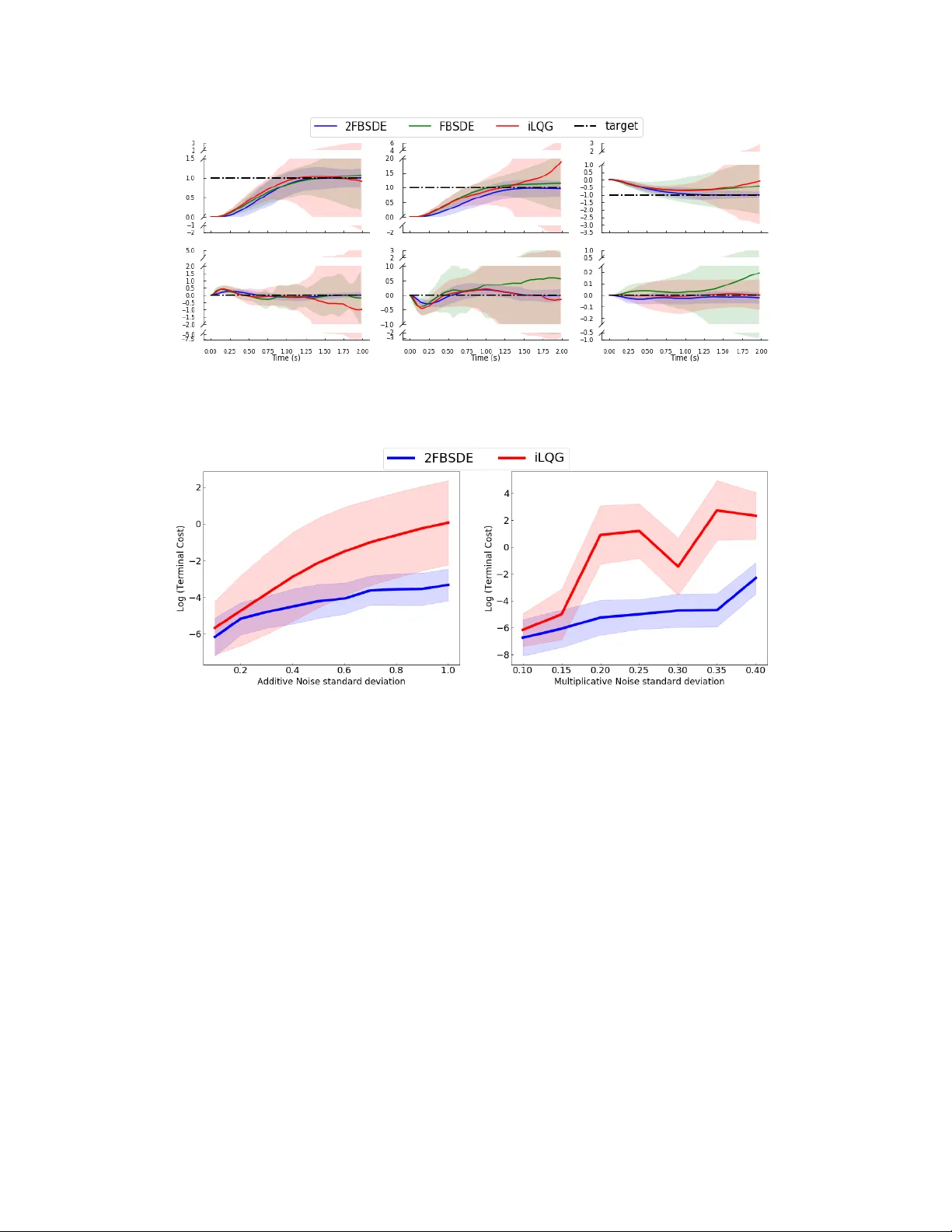
본 논문은 제어 입력에 직접 곱해지는 잡음, 즉 제어 곱셈 잡음이 포함된 비선형 확률 시스템의 최적 제어 문제를 해결하기 위한 새로운 딥 러닝 기반 알고리즘을 제시한다. 연구 배경으로는 기존의 선형-가우시안(LQG) 및 iLQG와 같은 선형화 기반 방법이 제어 곱셈 잡음이 존재할 경우 수렴성 보장이 어렵고, 샘플링 기반 방법(예: MCMC, Fokker‑Planck)도 고차원에서 그리드 연산이 필요해 확장성이 제한된다는 점을 들었다. 또한, 비선형 Feynman‑Kac 정리를 이용한 2차 순방향‑역방향 확률 미분 방정식(2FBSDE) 접근법이 이론적으로는 가능하지만, 기존 구현에서는 매 시간 단계마다 최소제곱 회귀를 수행해 누적 오차와 높은 계산 비용이 발생한다는 문제점이 있었다.
논문은 먼저 시스템 모델을 정의한다. 상태 x∈ℝⁿˣ, 제어 u∈ℝⁿᵘ, 그리고 Brownian motion v(t), w(t)를 이용해 다음과 같은 SDE를 제시한다.
dx =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기