스마트폰 기반 보행자 내비게이션 데이터셋 RuDaCoP
초록
본 논문은 스마트폰 센서를 이용한 보행자 내비게이션 알고리즘 개발을 위해 1,200여 개의 관측 세트를 제공하는 대규모 데이터셋 RuDaCoP을 소개한다. 각 세트는 10분 이내의 다양한 경로에서 수집된 관성 측정값과, 두 개의 발착용 관성 측정 유닛으로부터 얻은 고정밀 지상 진실(GT) 데이터를 포함한다. 데이터는 학습 기반 및 전통적 모델링 접근 모두에 활용 가능하도록 설계되었으며, 공개 URL을 통해 자유롭게 다운로드할 수 있다.
상세 분석
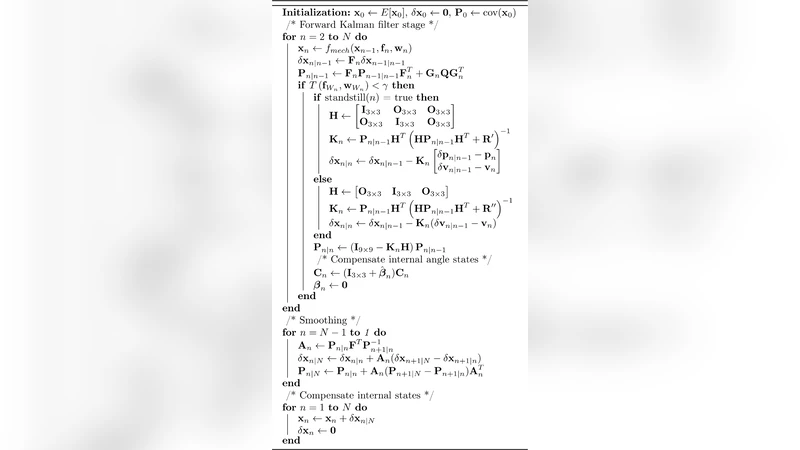
RuDaCoP 데이터셋은 스마트폰 기반 보행자 내비게이션 연구에 필요한 핵심 요소들을 균형 있게 제공한다는 점에서 의미가 크다. 첫째, 센서 종류와 샘플링 레이트가 명시적으로 기술되어 있어, 가속도계, 자이로스코프, 자기계 등 다중 센서 융합 연구에 바로 적용할 수 있다. 특히 여러 스마트폰 모델을 사용해 수집했기 때문에 기기별 센서 편향과 노이즈 특성을 학습 데이터에 포함시켜 실제 서비스 환경과의 격차를 최소화한다. 둘째, 지상 진실(GT)은 두 개의 발착용 관성 측정 유닛(IMU)을 이용해 독립적으로 추정한 뒤, 제시된 후처리 알고리즘으로 융합하였다. 이 과정은 드리프트 보정과 단계 검출을 고도화하여 1 cm 수준의 위치 정확도를 달성한다는 점에서 기존 공개 데이터셋보다 뛰어나다. 셋째, 데이터는 10분 이하의 다양한 경로(실내 복도, 실외 보행, 계단 오르내리기 등)와 속도 변화를 포함한다. 이는 학습 기반 모델이 시간적 연속성, 비선형 동역학, 그리고 환경 변화에 대한 일반화 능력을 키우는 데 필수적인 조건이다. 넷째, 데이터셋 메타정보에 각 세션의 스마트폰 착용 위치(포켓, 가방, 손목 등)와 사용자의 신체 특성(키, 체중, 보행 패턴)까지 기록돼 있어, 사용자 맞춤형 보행자 내비게이션 모델을 설계할 때 중요한 변수로 활용될 수 있다. 마지막으로, 저자들은 데이터 접근 방법과 사용 시 라이선스 조건을 명확히 제시했으며, GitHub 저장소와 연동된 예제 코드까지 제공한다. 이러한 전반적인 구성은 연구자들이 데이터 전처리, 모델 학습, 성능 평가까지 일관된 파이프라인을 구축하도록 돕는다.
댓글 및 학술 토론
Loading comments...
의견 남기기