로봇 팔의 가리키기 행동으로 의도 판단하기: 참조와 위치 지정의 차이
초록
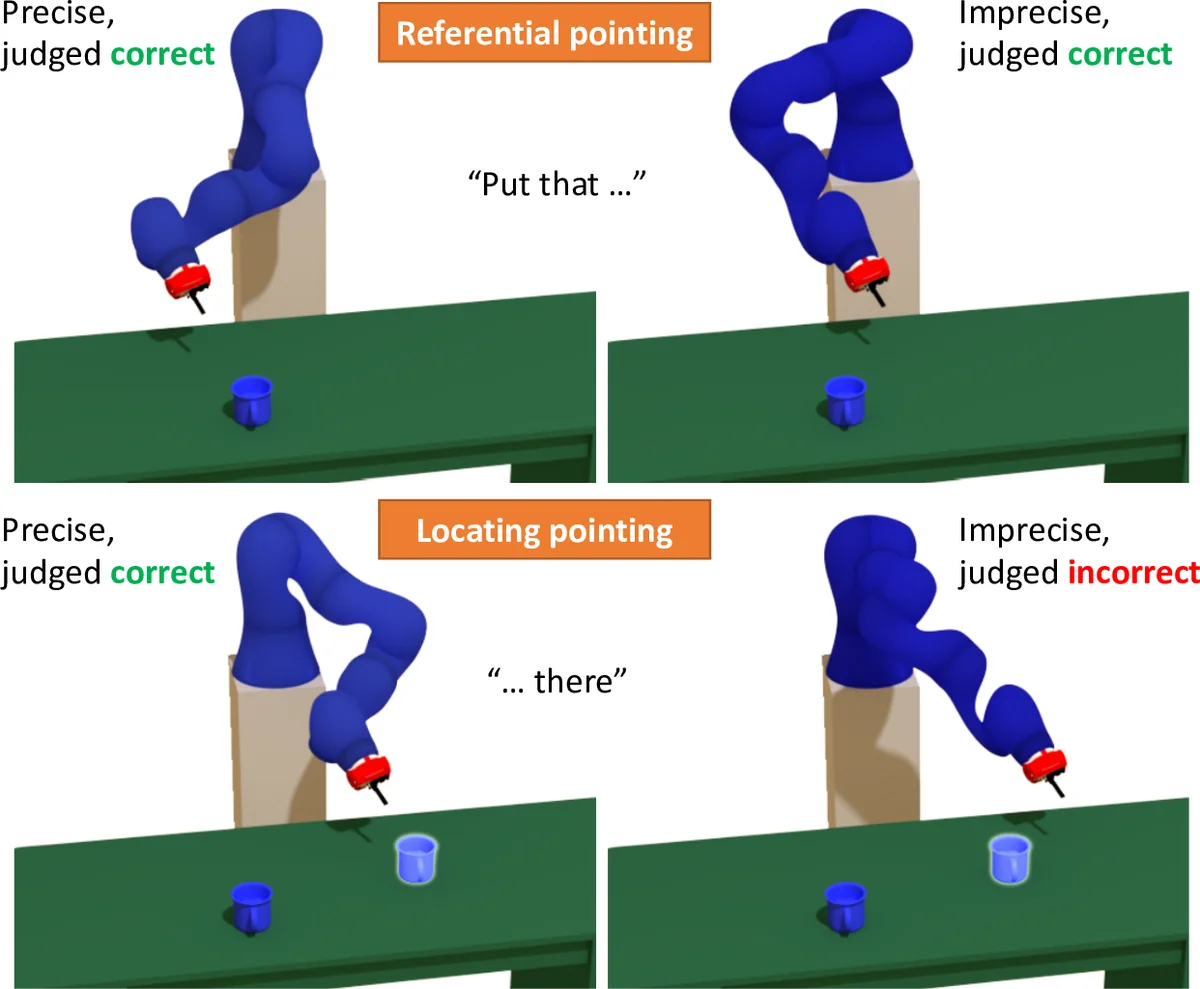
이 논문은 로봇 팔이 물체를 가리키는 동작을 통해 인간 파트너에게 작업 정보를 전달하는 방법을 연구한다. 기존 연구를 확장해 ‘참조 가리키기’(object identification)와 ‘위치 지정 가리키기’(placement location identification) 두 유형을 정의하고, 7,000여 건 이상의 인간 판단 데이터를 수집한 실험을 통해 각 유형의 해석 유연성 차이를 규명한다. 실험 결과, 참조 가리키기는 정확도에 크게 구애받지 않아도 인식이 가능하지만, 위치 지정 가리키기는 보다 정확하고 의도적으로 수행되어야 함을 보여준다. 또한 환경 복잡도·음성 보조·장면 변형 등이 해석에 미치는 영향을 분석하고, 이를 토대로 로봇 가리키기 행동을 설계하기 위한 원칙을 제시한다.
상세 분석
본 연구는 인간‑로봇 협업 상황에서 로봇 팔이 ‘지시적 가리키기’ 제스처를 통해 정보를 전달하는 메커니즘을 정량화하려는 시도이다. 먼저 저자는 기존 인간‑인간 커뮤니케이션 연구에서 도출된 ‘가리키기 원뿔(cone)’ 모델을 비판하고, 로봇이 수행하는 작업(픽‑앤‑플레이스)에서 요구되는 정확도가 일반적인 지시보다 훨씬 높다는 점을 강조한다. 이를 위해 ‘참조 가리키기’와 ‘위치 지정 가리키기’라는 두 가지 구분을 도입했으며, 전자는 물체 자체를 지목하는 것이고 후자는 물체를 놓을 최종 위치를 지정하는 것이다.
실험 설계는 두 로봇 플랫폼(Baxter와 Kuka)을 사용해 시뮬레이션 애니메이션을 제작하고, Amazon Mechanical Turk에서 28명 이상의 참여자를 각 조건에 배치해 7,290개의 판단 데이터를 수집했다. 각 실험에서는 가리키기 레이(r)가 테이블 표면과 교차하는 점 x*를 계산하고, 이를 통해 ‘정확한’ vs ‘부정확한’ 가리키기 행동을 정의한다. 특히, 가리키기 레이와 목표 사이의 각도 θ를 조절해 ‘정밀’(θ 작음)과 ‘불명확’(θ 큼) 상황을 만들었으며, 일부 실험에서는 “Put that there”와 같은 동기화된 음성 힌트를 추가해 멀티모달 효과를 검증했다.
분석 결과는 두 가지 주요 인사이트를 제공한다. 첫째, 인간은 참조 가리키기에 대해 높은 해석 유연성을 보이며, 가리키기 레이와 물체 사이의 거리가 다소 차이 나더라도 올바른 물체를 추론한다. 이는 인간이 물체의 존재 가능성을 ‘후보 집합’으로 인식하고, 가장 가까운 후보를 선택하는 전략을 사용한다는 점과 일치한다. 반면, 위치 지정 가리키기는 작은 각도 차이에도 해석 오류가 크게 증가했으며, 특히 복잡한 장면(여러 물체가 겹쳐 있거나 스택된 경우)에서는 정확한 레이 정렬이 필수적이었다. 둘째, 음성 보조가 포함된 경우에도 위치 지정 가리키기의 정확도 향상은 제한적이었으며, 오히려 시각적 정확성이 우선시된다는 점을 보여준다.
이러한 결과를 토대로 저자는 ‘가리키기 선택 원칙’을 제시한다. 로봇은 현재 장면에서 가능한 후보 집합을 정의하고, 레이와 후보 사이의 거리 차이가 ‘유의미하게 더 멀다(significantly further)’는 경우를 배제한다. 즉, 가장 가까운 후보와 거리 차이가 임계값 이하인 모든 후보를 동시에 고려해 인간에게 선택 여지를 제공한다. 이 원칙은 특히 참조 가리키기에서 유용하며, 위치 지정 가리키기에서는 레이 정렬을 최적화하고, 필요 시 추가적인 시각적 마커나 더 긴 레이 길이를 활용해 후보 집합을 좁히는 전략을 권장한다.
연구의 한계로는 시뮬레이션 기반 애니메이션에 의존했으며, 실제 로봇 하드웨어와 물리적 상호작용에서 발생할 수 있는 동적 요인(예: 관절 진동, 시야 가림 등)을 충분히 반영하지 못했다는 점을 들 수 있다. 또한 문화권·언어권에 따라 가리키기 해석이 달라질 가능성을 탐색하지 않았으며, 향후 다국어·다문화 실험이 필요하다. 그럼에도 불구하고, 7천 건 이상의 대규모 인간 판단 데이터를 기반으로 한 정량적 분석은 로봇 가리키기 행동 설계에 실용적인 가이드라인을 제공한다는 점에서 큰 의의를 가진다.
댓글 및 학술 토론
Loading comments...
의견 남기기