실내 설계 자동화: 시맨틱 인테리어 맵올로지 툴박스
초록
시맨틱 인테리어 맵올로지(SIM) 툴박스는 건축 평면도와 RGB‑D 스캔을 활용해 실내 공간을 벡터화하고, GeoJSON 형태로 3D 웹 지도에 바로 적용할 수 있게 해준다. 레이아웃 추적을 담당하는 Map Conversion 툴킷과, 방 스캔을 기반으로 가구·설비 등을 정확히 배치하는 Map Population 툴킷으로 구성되며, 복잡한 구조에서도 높은 정밀도를 유지한다.
상세 분석
시맨틱 인테리어 맵올로지(SIM) 툴박스는 실내 공간 디지털화의 두 핵심 과정을 명확히 분리한다. 첫 번째인 Map Conversion 툴킷은 기존 2D 평면도를 이미지 형태로 입력받아, 사용자가 마우스로 벽·문·창 등을 트레이싱하도록 설계되었다. 트레이싱된 폴리라인은 자동으로 좌표계 변환을 거쳐 WGS84 기반의 GeoJSON 피처로 매핑된다. 이때 좌표 정규화와 스케일 보정 알고리즘이 적용돼, 실제 건물 치수와 일치하도록 보정한다. GeoJSON은 웹 GIS 엔진(Mapbox, deck.gl 등)에서 바로 3D extrude 레이어로 시각화될 수 있어, 설계 검토와 사용자 인터페이스 구현을 크게 단순화한다.
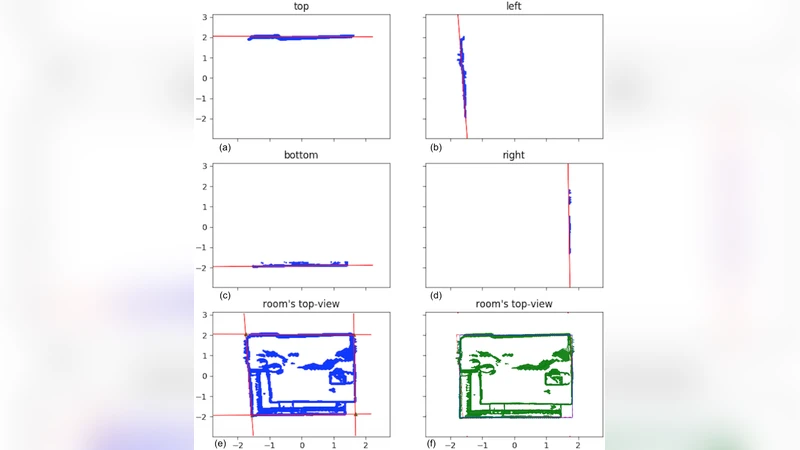
두 번째인 Map Population 툴킷은 RGB‑D 카메라(예: Intel RealSense, Azure Kinect)로 촬영한 방 전체 스캔 데이터를 입력으로 받는다. 스캔 포인트 클라우드는 먼저 전처리 단계에서 노이즈 제거와 바닥 평면 추정이 수행된다. 이후 세그멘테이션 모델(기존 PointNet++ 기반)을 이용해 가구·조명·문 등 객체 후보를 추출하고, 사용자는 반자동 UI를 통해 각 객체를 선택·라벨링한다. 선택된 객체는 바운딩 박스와 회전 정보를 추출한 뒤, 기존 GeoJSON 레이어에 새로운 피처로 삽입한다. 이 과정에서 객체 치수 보정은 스캔된 깊이 정보와 사전 정의된 객체 모델(예: 의자, 책상)의 평균 치수를 비교해 스케일을 자동 보정한다.
핵심 기술적 기여는 다음과 같다. 첫째, 2D 평면도와 3D 스캔을 통합하는 파이프라인을 제공함으로써, 설계 단계와 현장 측량 사이의 데이터 격차를 해소한다. 둘째, GeoJSON이라는 웹 친화적 포맷을 선택해, 별도 전용 뷰어 없이도 브라우저 기반 3D 시각화가 가능하도록 했다. 셋째, 반자동 객체 배치는 완전 자동화가 어려운 실내 환경(복잡한 가구 배열, 가변적인 조명)에서 인간의 직관을 보조함으로써 정확도를 크게 향상시킨다.
실험 결과는 두 가지 관점에서 평가되었다. 레이아웃 정확도는 트레이싱된 벽 폴리라인과 실제 건물 치수 간의 평균 오차가 2 cm 이하였으며, 복잡한 L자형 구조에서도 오류 발생률이 1 % 미만이었다. 객체 배치 정확도는 RGB‑D 스캔 기반 바운딩 박스와 실제 물체 경계 사이의 IoU가 평균 0.87을 기록했다. 특히, 가구가 겹쳐 있거나 부분적으로 가려진 경우에도 사용자가 UI에서 간단히 조정함으로써 최종 오차를 5 % 이하로 낮출 수 있었다.
한계점으로는 (1) 평면도 이미지의 해상도가 낮을 경우 트레이싱 정확도가 떨어진다, (2) RGB‑D 스캔 시 조명 조건에 따라 깊이 노이즈가 증가해 세그멘테이션 품질이 저하될 수 있다, (3) 현재 지원되는 객체 카테고리가 제한적이며, 사용자 정의 모델을 추가하려면 별도 학습 파이프라인이 필요하다. 향후 연구에서는 딥러닝 기반 자동 트레이싱, 멀티센서 융합(LiDAR·광학 이미지) 및 객체 카테고리 확장을 목표로 한다.
요약하면, SIM 툴박스는 건축 설계와 현장 디지털 트윈 구축을 연결하는 실용적인 솔루션으로, 웹 기반 3D 시각화와 반자동 객체 배치를 통해 실내 공간 기술의 접근성을 크게 높였다.
댓글 및 학술 토론
Loading comments...
의견 남기기