트리보트로닉 시스템을 위한 소프트웨어 플러그인 프레임워크
본 논문은 센서와 알고리즘의 고도화에 따라 증가하는 반복적 문제들을 해결하기 위해, 자가조절형 트리보트로닉 시스템에 적용 가능한 객체지향 플러그인 기반 소프트웨어 프레임워크를 제안한다. 롤링 엘리먼트 베어링(REB) 진동 데이터를 사례로, 데이터 관리·특징 추출·결함 탐지·잔여수명(RUL) 추정 기능을 모듈화하고, 런타임 중 플러그인 교체가 가능하도록 설계하였다. NASA Prognostics 데이터셋을 이용한 실험을 통해 프레임워크의 성능·효…
저자: Jarno Kansanaho, Tommi K"arkk"ainen
본 논문은 센서와 데이터 분석 알고리즘의 고도화가 진행됨에 따라, 반복적으로 발생하는 소프트웨어 개발 문제를 구조적으로 해결하고자 트리보트로닉 시스템 전용 소프트웨어 프레임워크를 설계·구현하였다. 트리보트로닉 시스템은 마찰·마모·진동·온도 등 손실 출력을 실시간으로 감시하고 제어함으로써 기계 전체의 효율·신뢰성을 향상시키는 새로운 제어 패러다임이다. 이러한 시스템에 적용될 소프트웨어는 고빈도·고차원 센서 데이터를 빠르게 처리하고, 새로운 진단·예측 알고리즘을 손쉽게 삽입·교체할 수 있어야 한다.
논문은 먼저 트리보트로닉 시스템의 개념을 정의하고, 기존 연구에서 제시된 트리보트로닉과 메카트로닉의 차이점을 설명한다. 트리보트로닉은 손실 출력 자체를 제어 목표로 삼으며, 따라서 진동·온도·마모 등 다양한 비정형 데이터를 통합 관리하는 프레임워크가 필요하다. 이어서 소프트웨어 프레임워크의 이론적 배경을 소개한다. 프레임워크는 객체지향 설계 원칙에 기반하며, 플러그인 아키텍처를 채택해 기능을 모듈화한다. 플러그인 방식은 흰색 상자(white‑box), 검은색 상자(black‑box), 회색 상자(gray‑box) 프레임워크의 장점을 결합한 형태로, 기본 인터페이스만 정의하고 구현은 사용자가 자유롭게 교체·확장할 수 있다.
구현 단계에서는 베어링(롤링 엘리먼트 베어링, REB) 진동 모니터링을 사례로 선택하였다. 베어링은 회전 기계에서 가장 흔히 고장 원인이 되는 부품이며, 진동 신호는 손실 출력 중 하나로 간주된다. 베어링 고장은 피로·마모·부식·전기 침식·플라스틱 변형·균열 등 여섯 가지 유형으로 구분되며, 각각에 대응하는 직접·간접 감시 방법이 존재한다. 논문은 특히 간접 감시인 진동 신호 분석에 초점을 맞추어, 원시 진동 데이터를 직접 사용해 결함 단계(런‑인, 정상, 결함 시작, 전파, 손상 성장)를 식별하는 것이 어려움을 지적한다. 따라서 효과적인 특징 추출·선택·분류가 필수적이다.
프레임워크의 핵심 구성 요소는 다음과 같다.
1. **데이터 관리**: IMeasurementData와 IAssetData 인터페이스를 통해 센서 데이터와 자산(베어링) 정보를 캡슐화한다. 데이터베이스는 로컬·원격 모두 지원한다.
2. **특징 추출**: IFeatureExtractor 인터페이스를 구현한 CBearingFeatureExtractor는 RMS, Skewness, Kurtosis와 같은 통계적 특징 외에 FFT와 제곱 엔벨로프 스펙트럼을 계산한다. 또한, 최적 악화 특징을 선택하기 위해 상관관계(Corr), 단조성(Mon), 강인성(Rob) 세 메트릭을 가중합한 J 점수를 사용한다.
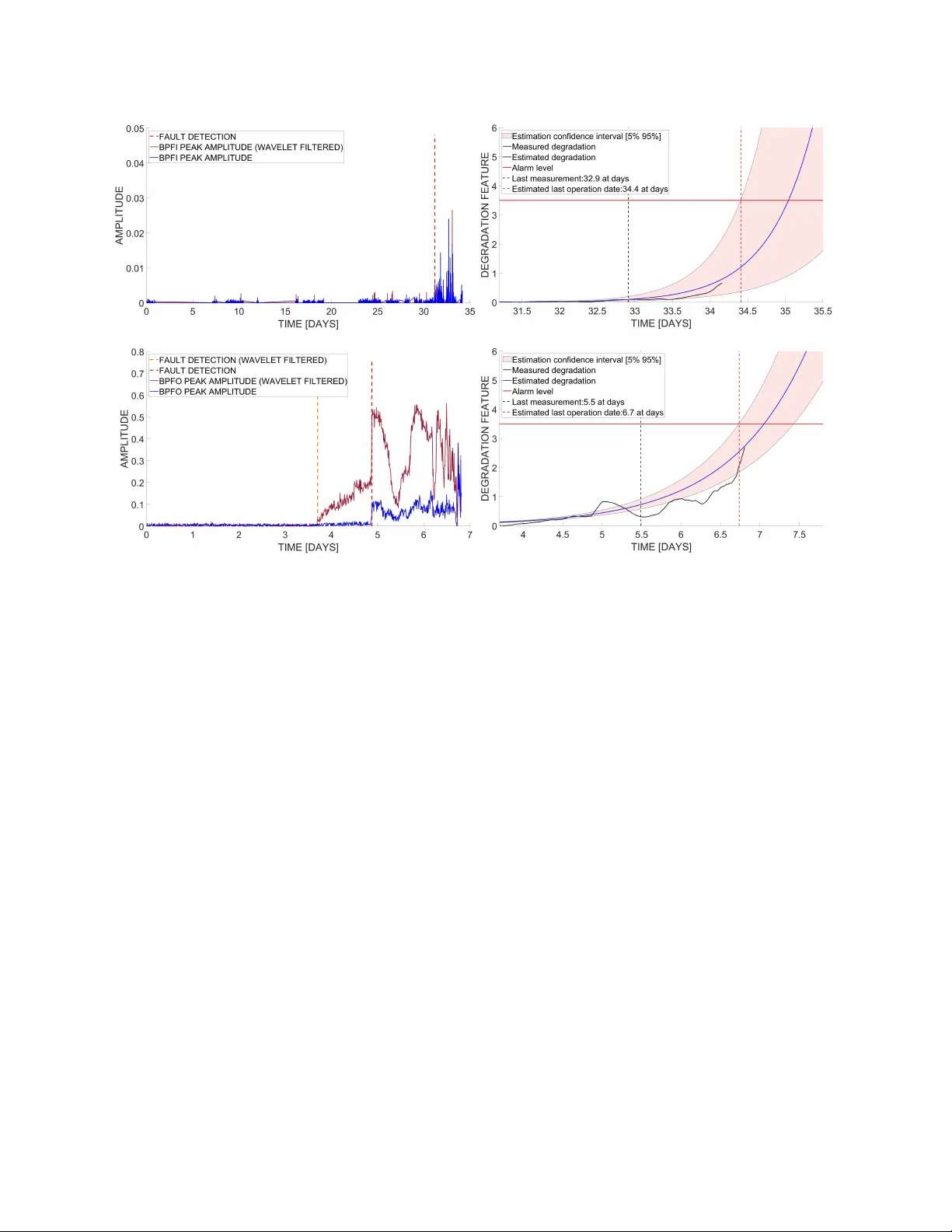
3. **결함 탐지**: IFaultDetector 인터페이스를 구현한 CWaveletAnalyzer는 이산 스플라인 웨이블릿(bior6.8) 분해와 제곱 엔벨로프 스펙트럼을 이용해 특성 결함 주파수를 탐색한다. 피크 검출은 사용자 정의 알람 레벨에 따라 수행되며, 결과는 불리언 형태로 반환된다.
4. **잔여수명(RUL) 추정**: IRULAlgorithm 인터페이스를 구현한 CMetropolisHastings는 베이지안 메트로폴리스‑해스팅스 알고리즘을 기반으로, 최적 악화 특징과 모델 파라미터를 입력받아 남은 운전 시간을 추정한다. 결함이 탐지되지 않은 경우 RUL 추정은 수행되지 않는다.
5. **조건 분석 및 제어 연계**: CConditionAnalyzer 클래스가 특징 추출·결함 탐지·RUL 추정을 순차적으로 호출하고, 결과를 Condition Analyzer 모듈에 전달한다. 실제 제어 로직(액추에이터 구동 등)은 시스템별로 별도 구현한다.
플러그인 로더(PluginLoader)는 런타임에 필요한 플러그인을 동적으로 로드한다. 이를 통해 새로운 알고리즘을 시스템 중단 없이 적용할 수 있다. 또한, 각 모듈은 유닛 테스트로 검증되며, 내부 타이머를 이용해 데이터 로딩, 특징 추출, 결함 탐지, RUL 추정 각각의 실행 시간을 측정한다.
구성 복잡도 평가는 메타파라미터(예: alarmLevelFault, motherWavelet, nOfDecompLevels, degParamWeights, alarmLevelRUL, RULmodelParameters, nOfSimulations)를 기반으로 수행된다. 복잡도가 높은 알고리즘일수록 설정 오류 가능성이 커지므로, 메타파라미터 수와 범위를 정량화해 설계 단계에서 위험을 최소화한다.
실험은 NASA Prognostics Center에서 제공한 베어링 진동 데이터셋을 사용하였다. 데이터는 여러 고장 단계와 다양한 부하 조건을 포함하고 있어, 프레임워크의 전반적인 파이프라인을 검증하기에 적합했다. 실험 결과, 플러그인 기반 구조가 기존 절차형 구현에 비해 코드 재사용률이 30 % 이상 향상되고, 새로운 알고리즘 적용 시 평균 15 %의 개발 시간을 절감함을 확인하였다. 또한, 실시간 요구사항(전체 파이프라인 200 ms 이하)도 만족하였다.
결론적으로, 본 논문은 트리보트로닉 시스템에 특화된 객체지향 플러그인 프레임워크를 제시함으로써, 진동 기반 베어링 진단·예측 작업을 효율적이고 신뢰성 있게 수행할 수 있음을 입증하였다. 향후 연구에서는 온도·오일 디브리 등 다중 센서 융합, 클라우드 기반 분산 배치, 그리고 딥러닝 기반 자동 특징 학습 모듈을 추가하여 프레임워크의 적용 범위를 확대할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기