자율주행 시뮬레이션과 데이터 활용 현황
초록
본 논문은 항공 분야 기업이 자율주행 차량 시장에 진입하기 위해 필요로 하는 최신 시뮬레이션 기술과 데이터 활용 방식을 조사한다. 주요 자동차·기술 기업과 스타트업의 시뮬레이션 파이프라인, 컴퓨팅 인프라, 현실 연계 방법, 그리고 안전 검증(V&V) 요구사항을 분석하고, 항공 산업에 적용 가능한 시사점을 도출한다.
상세 분석
논문은 먼저 자율주행 분야에서 시뮬레이션이 차지하는 전략적 위치를 정의한다. 시뮬레이션은 센서 모델링, 환경 재현, 행동 정책 검증, 그리고 대규모 시나리오 테스트를 포괄하는 통합 플랫폼으로, 물리적 시험 비용을 크게 절감하면서도 위험도가 높은 상황을 안전하게 재현한다는 점에서 핵심적이다. 주요 기업들을 살펴보면, Waymo는 클라우드 기반의 “Simulation‑as‑a‑Service” 모델을 구축해 수십억 개의 가상 주행 데이터를 자동 생성하고, 이를 머신러닝 파이프라인에 직접 피드한다. Tesla는 자체 차량에서 수집한 실시간 텔레메트리를 활용해 “디지털 트윈”을 지속적으로 업데이트하고, 시뮬레이션과 실제 주행 사이의 피드백 루프를 짧게 유지한다. NVIDIA는 PhysX와 Omniverse를 결합해 고정밀 물리 엔진과 실시간 레이 트레이싱을 제공함으로써 라이다·카메라·레이다 센서의 광학 특성을 정밀하게 모델링한다. Microsoft는 Azure Digital Twins와 협업해 대규모 도시 수준의 3D 맵을 생성하고, 여기서 파생된 시뮬레이션 환경을 다양한 차량 제어 알고리즘에 적용한다.
스타트업 영역에서는 Mapper와 HERE가 고해상도 HD 맵을 실시간 스트리밍하고, Cognata는 시나리오 기반의 교통 흐름과 행동 모델을 AI 기반으로 자동 생성한다. 이들 기업은 모두 데이터 파이프라인의 자동화, 시뮬레이션 결과의 메트릭화, 그리고 지속적인 모델 업데이트를 핵심 역량으로 삼는다.
컴퓨팅 인프라 측면에서는 GPU 클러스터와 고성능 CPU, 그리고 최근 부상하는 TPU와 같은 특수 가속기가 혼합된 하이브리드 아키텍처가 일반적이다. 특히 대규모 시뮬레이션에서는 “시뮬레이션 파라미터 스위핑”을 위해 수천 개의 병렬 작업을 동시에 실행하며, 이를 관리하기 위한 쿠버네티스 기반 오케스트레이션이 표준화되고 있다.
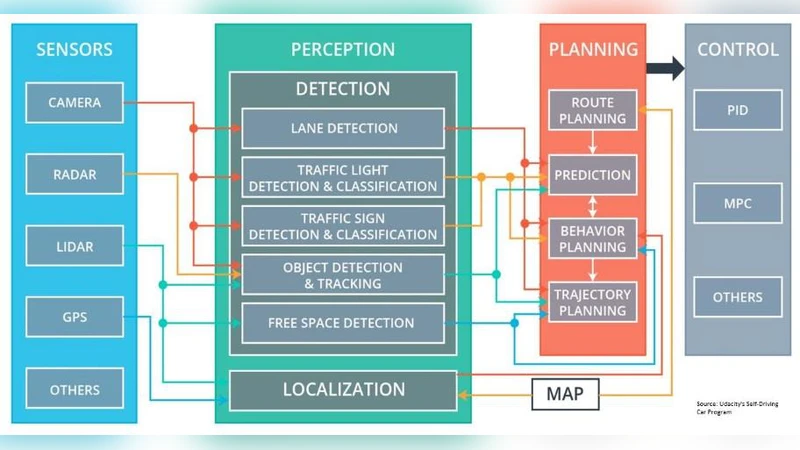
시뮬레이션의 충실도 수준은 크게 세 단계로 구분된다. 1) 센서 레벨 모델링 – 물리 기반 광학·전파 모델을 통해 라이다·카메라·레이다의 노이즈와 왜곡을 재현한다. 2) 환경 레벨 – 고정밀 3D 지도와 동적 객체(보행자·자전거·다른 차량)의 행동 모델을 포함한다. 3) 시스템 레벨 – 전체 차량 제어 스택과 V2X 통신을 포함한 통합 테스트를 수행한다. 각 단계마다 요구되는 데이터 양과 컴퓨팅 비용이 급격히 증가하므로, 목적에 맞는 적절한 충실도 선택이 비용 효율성을 좌우한다.
안전성 검증(V&V) 관점에서 논문은 시뮬레이션이 규제 기관의 인증 절차와 어떻게 연계될 수 있는지를 탐구한다. 현재 미국 NHTSA와 유럽 UNECE는 시뮬레이션 기반 테스트를 보조 증거로 인정하고 있으며, 시뮬레이션 결과를 실세계 테스트와 통계적으로 연계하는 “신뢰 구간” 접근법이 제안되고 있다. 따라서 시뮬레이션 데이터의 재현성, 추적 가능성, 그리고 메타데이터 관리가 핵심 품질 관리 요소로 부각된다.
항공 산업에 적용할 경우, 기존 항공 시뮬레이터가 갖춘 고정밀 물리 모델과 인간-기계 인터페이스 설계 노하우를 자율주행 시뮬레이션에 전이할 수 있다. 예를 들어, 항공기의 비행 동역학 모델링 기법을 지상 차량의 동역학에 맞게 변형하거나, 항공 교통 관리(ATM)와 유사한 교통 흐름 제어 알고리즘을 도입함으로써 시뮬레이션 기반 교통 관리 솔루션을 개발할 수 있다.
결론적으로, 논문은 자율주행 시뮬레이션이 데이터 수집, 모델링, 컴퓨팅, 그리고 안전 검증 전 과정을 통합하는 핵심 인프라이며, 항공 분야 기업이 이 영역에 진입하려면 기존 시뮬레이션 역량을 확장하고, 클라우드·AI·고정밀 맵핑 기술을 적극 수용해야 함을 강조한다.
댓글 및 학술 토론
Loading comments...
의견 남기기