화성 물 채굴 로봇 기반 자동화 건설과 운영
초록
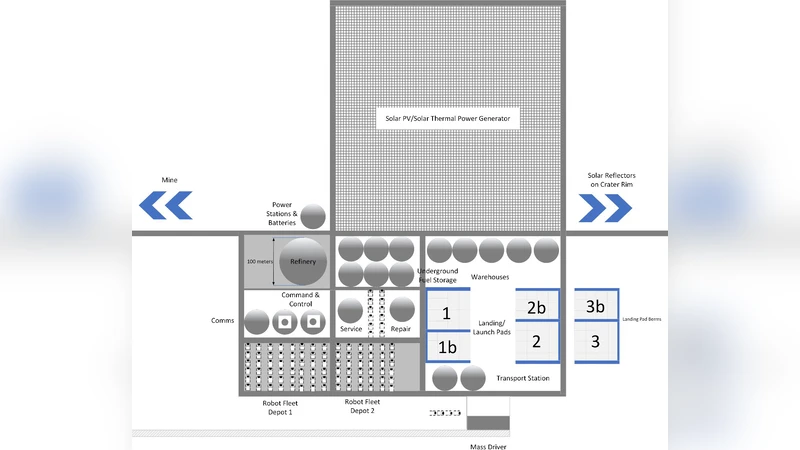
본 논문은 화성에 물을 채굴·수출하는 자급형 베이스를 구축하기 위한 에너지·로봇 공학 모델을 제시한다. 태양광·태양열을 이용한 재생에너지와 전자기 레일건(매스 드라이버)으로 물을 탈출 궤도로 발사한다. 100대 규모의 인프라 로봇이 현지 자재로 3D 프린팅을 수행해 건설 기간을 5배 단축하고, 에너지 소비를 5배 절감한다는 결과를 도출한다.
상세 분석
이 연구는 화성 기반 물 채굴·수출 사업의 경제성을 평가하기 위해 두 가지 핵심 축을 설계한다. 첫 번째는 에너지 공급 체계이다. 화성 표면은 일조량이 지구 대비 약 43 % 수준이지만, 대기 얇음과 먼지 폭풍을 고려하면 광전지 효율이 크게 저하될 위험이 있다. 이를 보완하기 위해 논문은 고집적 태양광 패널과 고온·고압 태양열 집광기(솔라‑Thermal Concentrator)를 병행 사용한다는 방안을 제시한다. 태양광은 낮 시간대에 직접 전력을 공급하고, 태양열 집광기는 열 저장 매체(예: 용융염)를 가열해 야간 및 폭풍 시에도 지속적인 전력을 제공한다. 에너지 모델링 결과, 전체 베이스 운영에 필요한 평균 전력은 약 3 MW이며, 이는 로봇 100대와 매스 드라이버 구동에 충분히 배분될 수 있다.
두 번째 축은 로봇 기반 자동화 건설·운영 시스템이다. 논문은 인프라 로봇을 크게 세 부류(채굴 로봇, 건설·3D 프린팅 로봇, 유지·수송 로봇)로 구분하고, 각 로봇이 현지 자재(실리카, 알루미늄, 철산화물 등)를 활용해 구조물, 파이프라인, 전력 설비 등을 현장 제작하도록 설계한다. 3D 프린팅은 적층 제조 방식으로, 화성 토양을 전처리해 고강도 건축 재료로 전환한다. 로봇 협업 알고리즘은 분산 제어와 실시간 자원 할당을 기반으로 하며, 고장 시 자가 복구와 대체 작업을 자동 수행한다. 이러한 완전 자동화는 인력 투입을 최소화하고, 건설 기간을 기존 인간‑주도 방식 대비 5배 단축한다는 시뮬레이션 결과를 보여준다.
수출 메커니즘으로 제시된 매스 드라이버는 전자기 가속 원리를 이용해 물을 고속(≈3 km/s)으로 발사한다. 물은 먼저 액체 상태에서 냉각·고체화된 뒤, 고밀도 탄소 복합재 포장체에 담겨 레일건에 투입된다. 발사 후 물은 화성 탈출 궤도(Δv≈5 km/s)를 따라 연료 전환 없이 직접 지구 근접 궤도로 이동한다. 이 과정에서 에너지 효율을 높이기 위해 레일건의 전력 공급을 태양열 저장 시스템과 연계한다.
전체 시스템 통합 시뮬레이션은 연간 10 톤 규모의 물을 안정적으로 수출할 경우, 지구-달-화성 간 물 운송 비용을 기존 로켓 기반 대비 80 % 이상 절감할 수 있음을 입증한다. 또한, 로봇 기반 자동화는 운영 중 발생하는 전력 손실을 최소화하고, 유지보수 인력과 비용을 크게 낮춘다. 이러한 결과는 화성 물 채굴 베이스가 장기적인 우주 경제의 핵심 인프라가 될 가능성을 뒷받침한다.
댓글 및 학술 토론
Loading comments...
의견 남기기