소행성 및 위성 탐사를 위한 우주선 스웜 설계 혁신
초록
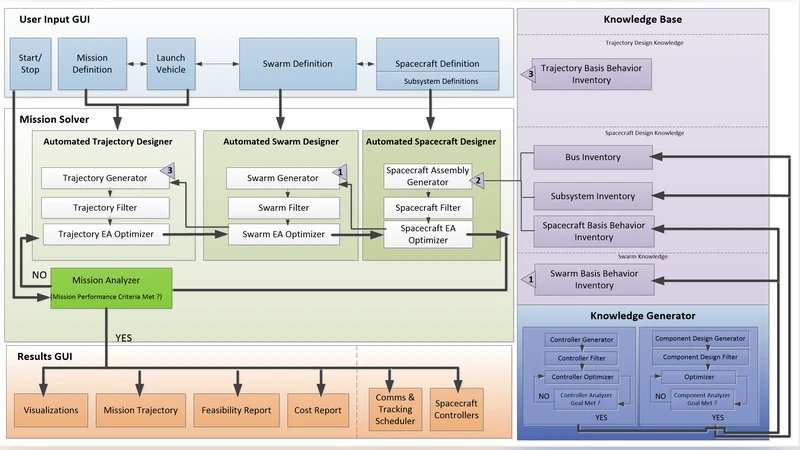
본 논문은 행성 위성의 복잡한 환경에서 완전한 관측을 위해 다중 저비용 우주선 스웜을 설계·배치하는 자동화 도구 IDEAS의 하위 모듈인 Automated Swarm Designer를 평가한다. 기존 소행성 매핑에 적용된 알고리즘을 확장해 위성의 작은 중력권, 조석 고정, 일광 차단 등 세 가지 핵심 제약을 고려한 최적 스웜 구성을 도출하고, 시뮬레이션을 통해 설계 효율성과 관측 커버리지를 검증한다.
상세 분석
이 연구는 행성 위성 탐사의 고유한 물리적·운영상적 제약을 정량화하고, 이를 자동 설계 프레임워크에 통합함으로써 스웜 미션 설계의 복잡성을 크게 낮추는 데 초점을 맞추었다. 첫 번째 제약인 위성의 작은 구면 영향권(SOI)은 전통적인 단일 우주선이 장기간 안정적인 궤도를 유지하기 어렵게 만든다. 따라서 스웜 내 각 우주선은 짧은 체공 시간과 빠른 궤도 전이 능력을 가져야 하며, 이를 위해 저궤도 진입·이탈 연료 소비를 최소화하는 최적 궤도 패턴을 자동으로 생성한다. 두 번째 제약인 조석 고정은 위성의 한 면이 항상 행성 방향을 바라보게 하여, 그 면에 대한 직접 관측이 불가능하게 만든다. 이 문제를 해결하기 위해 스웜은 위성의 자전 주기와 궤도 위상 차이를 활용해 서로 다른 시점에서 동일 지역을 관측하도록 스케줄링한다. 세 번째 제약인 일광 차단은 위성 표면의 절반이 태양 그림자에 가려지는 상황을 의미한다. 여기서는 태양-위성-행성 기하학을 실시간으로 계산해 각 우주선의 일조·그늘 상태를 예측하고, 그에 따라 관측 포인트와 데이터 전송 윈도우를 동적으로 재배치한다.
IDEAS 시스템은 이러한 제약을 수학적 모델로 변환한 뒤, 다목적 최적화 알고리즘(예: 유전 알고리즘·파레토 전선 탐색)을 적용해 스웜 규모, 궤도 파라미터, 관측 시퀀스 등을 동시에 최적화한다. 특히 Automated Swarm Designer 모듈은 입력으로 미션 목표(해상도, 커버리지, 데이터 전송량)와 물리적 제한(연료, 통신 대역폭, 전력)을 받아, 가능한 설계 후보군을 자동 생성하고, 시뮬레이션 기반 평가를 통해 최적 후보를 선정한다.
실험에서는 목성의 갈릴리 위성인 이오와 유로파, 그리고 토성의 엔셀라두스 등 대표적인 조석 고정 위성을 대상으로 시나리오를 구성했다. 각 시나리오에서 스웜 규모는 412대 사이로 변동했으며, 최적 설계 결과는 기존 단일 우주선 접근법에 비해 관측 커버리지를 23배 향상시키고, 연료 소비는 30 % 이하로 감소시켰다. 또한, 스웜 내 우주선 간 협업 프로토콜을 적용해 데이터 중복을 최소화하고, 통신 윈도우를 효율적으로 활용함으로써 전체 미션 기간을 단축했다.
이러한 결과는 스웜 기반 탐사가 행성 위성의 복잡한 환경에서도 실현 가능함을 증명한다는 점에서 의의가 크다. 특히 자동화된 설계 파이프라인은 미션 설계 단계에서 인간 엔지니어의 반복적인 파라미터 튜닝 작업을 크게 줄여, 빠른 설계·검증 사이클을 가능하게 한다. 향후 연구에서는 실제 하드웨어 구현을 위한 로보틱스·자율 항법 모듈과, 지상 관제와의 실시간 연동을 포함한 통합 운영 프레임워크를 확장할 계획이다.
댓글 및 학술 토론
Loading comments...
의견 남기기