연속 그래프 근사법을 이용한 동적 시스템 모델링
본 논문은 미지의 비선형 Lipschitz 동역학을 가진 이산시간 시스템을 비모수적으로 온라인 모델링하는 방법을 제안한다. 측정된 상태-다음 상태 쌍을 이용해 함수 그래프를 둘러싼 2차 제약(Quadratic Constraint) 기반의 엔벨로프를 순차적으로 구축하고, 이를 통해 함수값의 집합적 추정, 외부 타원 근사, 그리고 양의 불변 집합 계산을 수행한다.
저자: Siddharth H. Nair, Monimoy Bujarbaruah, Francesco Borrelli
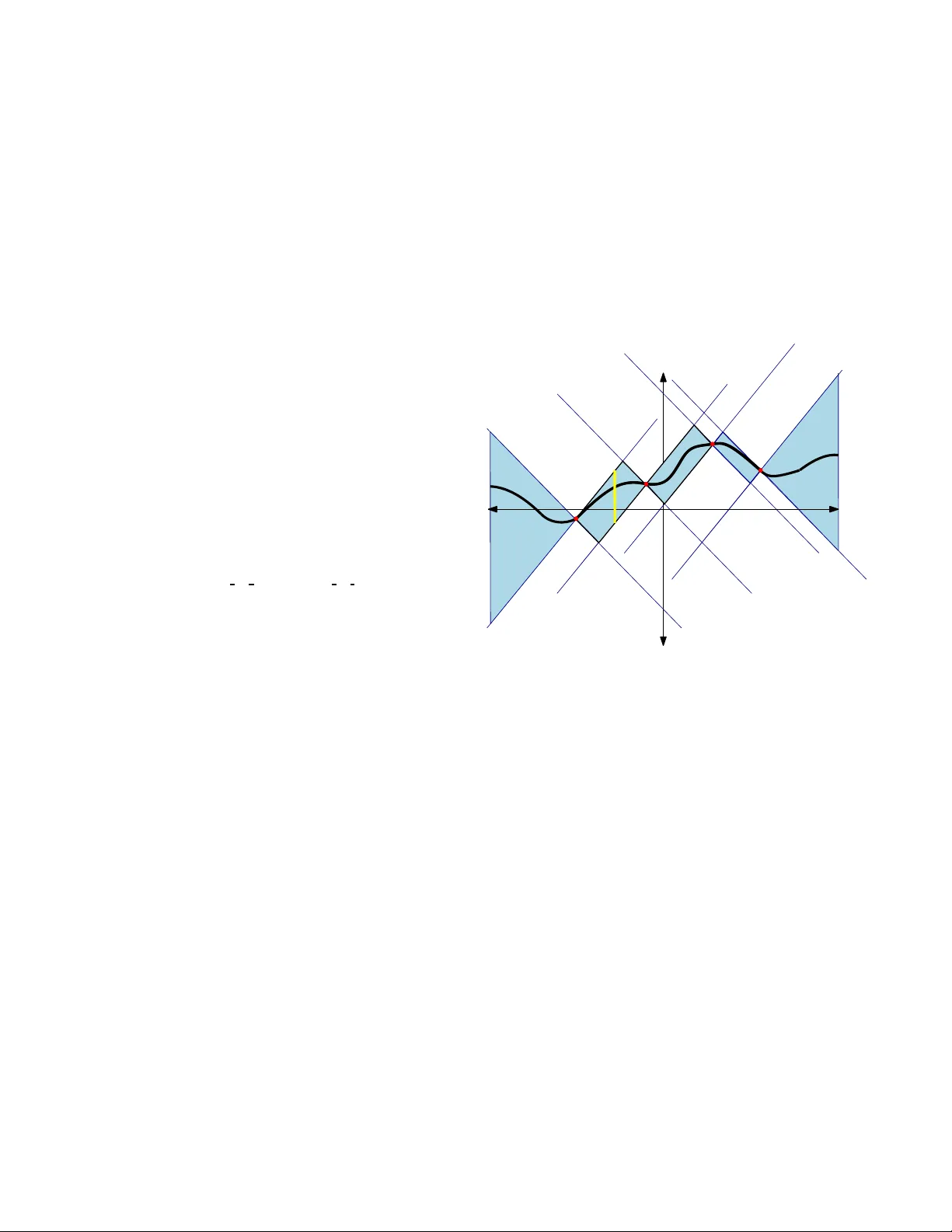
본 논문은 미지의 비선형 Lipschitz 연속성을 가진 이산시간 자율 시스템 x_{k+1}=f(x_k) 에 대해, 파라메트릭 모델링이 아닌 비모수적 접근을 통해 시스템 동역학을 온라인으로 모델링하는 새로운 방법을 제안한다. 저자는 먼저 함수 f 의 그래프 G(f)=\{(x,f(x))\mid x∈X\} 를 직접 추정하기보다는, 그래프를 포함하는 “엔벨로프”(envelope) E_f⊂ℝ^n×ℝ^n 를 구성한다는 아이디어를 도입한다. 이 엔벨로프는 측정된 상태-다음 상태 쌍 (x_k,x_{k+1}) 과 사전에 알려진 Lipschitz 상수 L 을 이용해 2차 제약(Quadratic Constraint, QC) 형태로 정의된다.
구체적으로, 각 측정점 (x_k,f(x_k)) 에 대해 대칭 행렬 Q_f^L(x_k) 를 정의하고,
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기