뇌 영감을 받은 센서모터 학습으로 뱀 로봇 전진 및 회전 제어
본 논문은 중앙 패턴 발생기(CPG) 개념을 차용한 피드백 입자 필터(FPF) 기반의 학습 프레임워크를 제시한다. 뱀 로봇의 주기적 전진 보행을 기본으로, 관측 노이즈와 미지의 동역학을 가정한 상태에서 마찰 계수를 조절해 시계·반시계 방향 전환을 최적화한다. 위상 변수를 이용해 차원 축소하고, 온라인 Q‑학습을 통해 해밀토니안(또는 Q‑함수)을 선형 근사한다. 실험은 5‑링크 뱀 로봇 시뮬레이션으로 검증하였다.
저자: Tixian Wang, Amirhossein Taghvaei, Prashant G. Mehta
본 논문은 뇌의 중앙 패턴 발생기(CPG) 메커니즘을 모방하여, 센서모터 학습을 통한 뱀 로봇의 주기적 보행 및 회전 제어를 구현하는 새로운 프레임워크를 제시한다. 연구는 크게 네 단계로 구성된다.
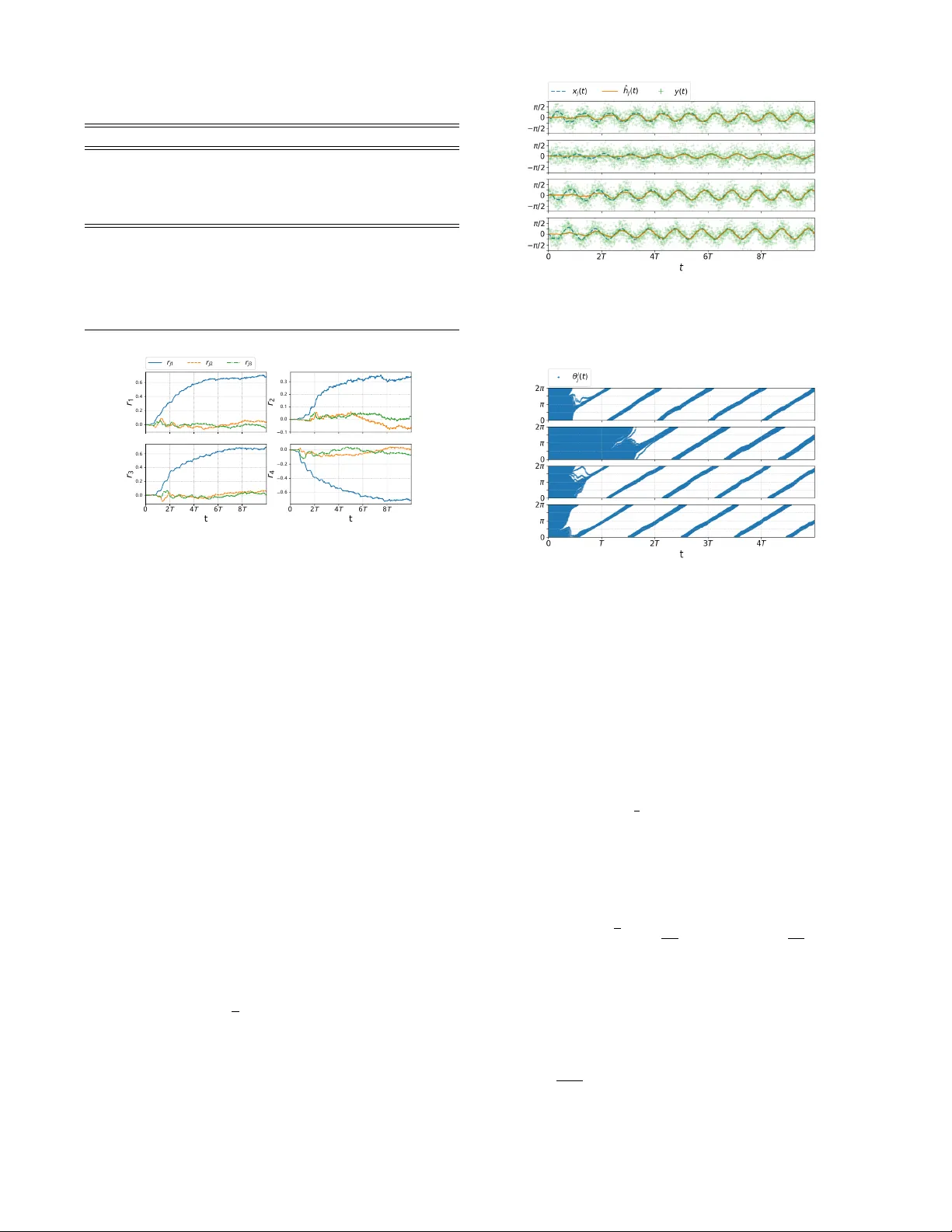
첫 번째 단계는 위상 모델링이다. 뱀 로봇은 n개의 평면 강체 링크와 n‑1개의 회전 관절로 구성되며, 각 관절의 형태 변수 x_j와 그 미분 ˙x_j 로 기술된다. 주기적인 토크 입력 τ_j(t)=τ₀j sin(ω₀t+β_j) 가 가해지면, 시스템은 고유한 제한 주기를 형성한다. 저자들은 각 제한 주기를 위상 변수 θ_j∈
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기