CameraTransform 파이썬 패키지로 시점 보정 자동화
초록
CameraTransform는 사진의 높이·틸트·방위각을 GPS 좌표나 물체 크기와 같은 부가 정보만으로 자동 추정하고, 이를 이용해 원근 왜곡을 보정하는 파이썬 라이브러리다. 내장된 카메라 매트릭스 모델(내부·외부 파라미터)과 최소‑제곱 피팅, 지오레퍼런싱 기능을 통해 고정 카메라와 헬리콥터 촬영 모두에 적용 가능하며, 펭귄 군락 관찰 사례를 통해 정확도와 활용성을 검증한다.
상세 분석
본 논문은 컴퓨터 비전에서 기본이 되는 투영 변환을 ‘동차 좌표( homogeneous coordinates )’라는 수학적 틀로 정리하고, 이를 파이썬 패키지 CameraTransform에 구현한다. 카메라 매트릭스 C는 내부 매트릭스 C_intr와 외부 매트릭스 C_extr의 곱으로 정의되며, 내부 매트릭스는 초점거리 f, 센서 크기, 이미지 해상도에서 파생된 f_pix과 이미지 중심( w_image/2 , h_image/2 )을 이용해 구성한다. 외부 매트릭스는 카메라의 3차원 위치 (x, y, –height)와 세 개의 회전 행렬(tilt, roll, heading)으로 이루어지며, 회전 순서는 roll → tilt → heading 로 설정한다. 이렇게 정의된 C를 통해 세계 좌표 p_world를 이미지 좌표 p_image 로 직접 투영( C·p_world )하고, 역투영은 고정된 하나의 세계 좌표(예: 지면 z=0)와 매트릭스 역연산을 결합해 수행한다.
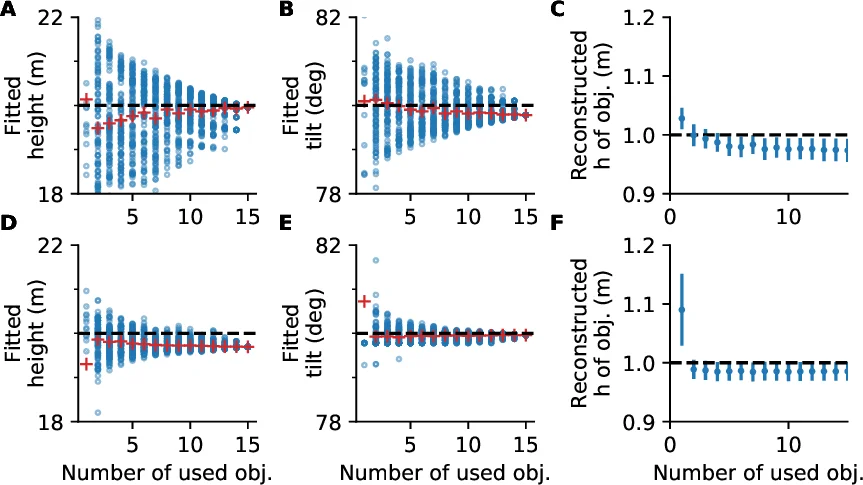
핵심 기술은 ‘외부 파라미터 자동 추정’이다. 저자는 물체의 실제 높이(예: 펭귄 1 m)와 이미지에서의 발·머리 좌표를 입력으로, 발 좌표를 세계 좌표로 역투영한 뒤 알려진 높이만큼 z축을 이동시켜 다시 이미지에 투영한다. 이때 관측된 머리 좌표와의 차이를 최소화하는 비선형 최소‑제곱 최적화를 수행해 카메라 높이와 틸트, 필요시 롤·헤딩을 추정한다. 또한 지평선이 보이는 경우, 지평선 라인을 추가 제약으로 넣어 파라미터 수렴성을 크게 향상시킨다.
불확실성 분석에서는 카메라 높이와 틸트에 ±10 % 변동을 주어 1 m 높이 물체를 50–300 m 거리에서 투영·역투영했을 때 재구성 오차를 측정한다. 결과는 높이 변동에 대한 오차가 거리와 무관하게 작지만, 틸트 변동은 거리 증가에 따라 오차가 급격히 커짐을 보여준다. 따라서 틸트 파라미터의 정확한 추정이 전체 보정 정확도의 핵심임을 확인한다.
헬리콥터 촬영처럼 틸트가 크고 지평선이 보이지 않을 경우, 저자는 위성·지도 이미지와의 ‘이미지 레지스트레이션’ 방식을 제안한다. 이미지와 지도상의 대응점 8개를 이용해 전체 외부 파라미터(위치·높이·틸트·헤딩)를 동시에 최적화한다. 실험에서는 한 점이 지형 변화로 오차를 보였지만, 나머지 점들은 1 m 수준의 정밀도로 맞춰졌다.
패키지는 GPLv3 라이선스로 공개되었으며, ReadTheDocs에 설치·사용 예제가 제공된다. 코드 구조는 NumPy·SciPy 기반이며, 함수형 인터페이스와 클래스형 API를 모두 지원해 연구자들이 손쉽게 파라미터 추정·이미지 보정을 파이프라인에 삽입할 수 있다.
댓글 및 학술 토론
Loading comments...
의견 남기기