레이리 감쇠 2차 시스템 데이터 기반 식별
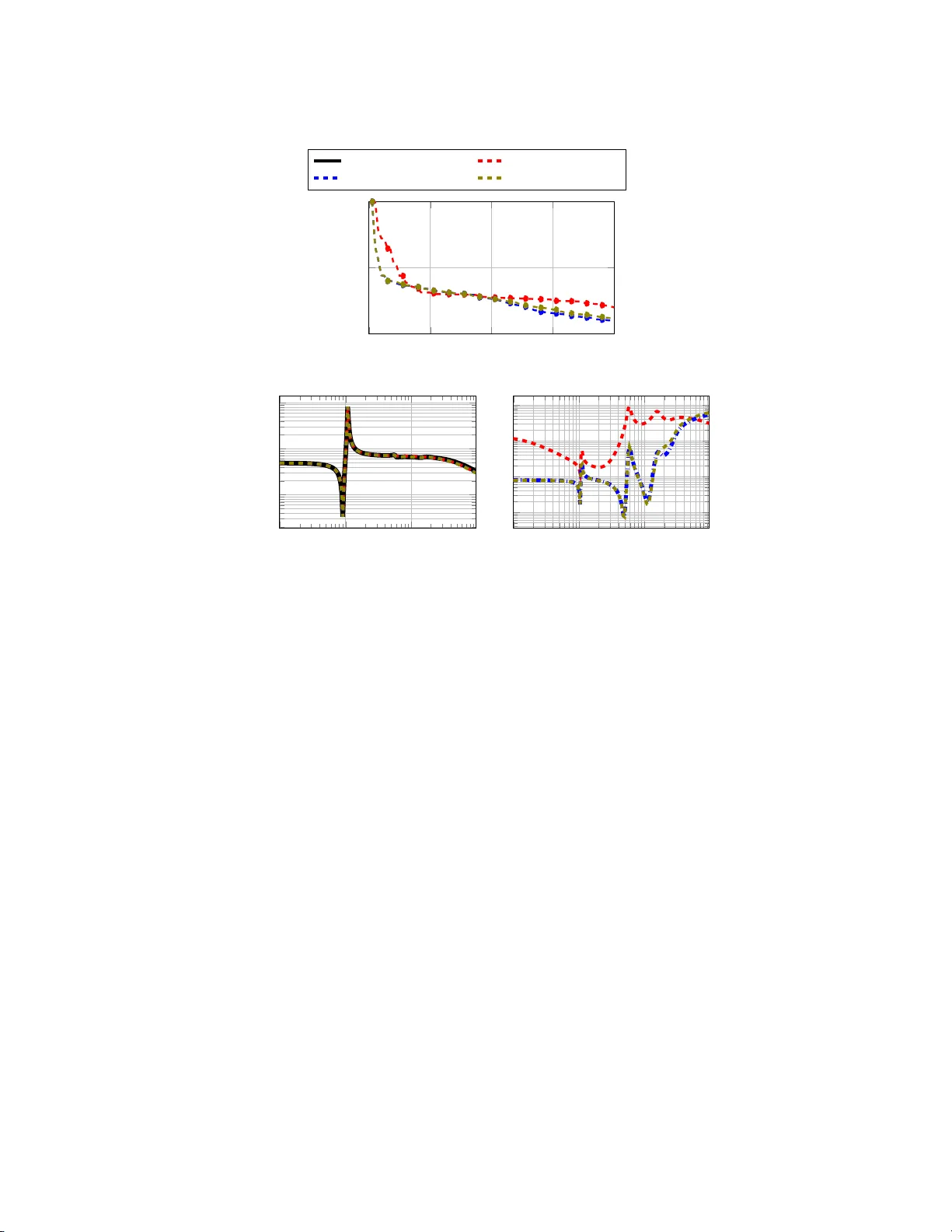
본 논문은 질량·강성 행렬의 선형 결합 형태인 레이리 감쇠 가정 하에, 주파수 응답 데이터만을 이용해 2차 동적 시스템을 식별하는 새로운 Loewner 기반 프레임워크를 제시한다. 레이리 파라미터(α,β)를 사전에 알 경우와 추정할 경우 두 가지 절차를 제시하고, 수치 예제로 방법의 정확성과 효율성을 검증한다.
저자: Igor Pontes Duff, Pawan Goyal, Peter Benner
본 논문은 레이리 감쇠(Rayleigh damping) 구조를 갖는 2차 동적 시스템을 데이터 기반으로 식별하는 새로운 방법론을 제시한다. 레이리 감쇠는 감쇠 행렬 D가 질량 행렬 M과 강성 행렬 K의 선형 결합 D = αM + βK 형태로 표현되는 경우를 의미하며, 구조역학·진동공학에서 널리 사용된다. 전통적인 모델 차원 축소 기법은 시스템 행렬 자체에 접근할 수 있을 때 적용 가능하지만, 실험이나 시뮬레이션을 통해 얻은 주파수 응답 데이터만으로는 이러한 행렬을 직접 추정하기 어렵다.
저자들은 먼저 2차 시스템 Σ_SO = (M, D, K, B, C) 를 라플라스 변환을 통해 전이함수 H_SO(s) = C (s²M + sD + K)^{-1} B 로 표현한다. 이후, 주파수 샘플 {(σ_i, ω_i)} 가 주어졌을 때, H_SO(σ_i) = ω_i 를 만족하는 최소 차수의 시스템을 찾는 문제를 정의한다. 기존 Loewner 프레임워크는 1차 시스템 Σ_FO = (E, A, B, C) 에 대해 주파수 데이터로부터 Loewner 행렬 L, L_σ 를 구성하고, (Ê, Â, B̂, Ĉ) = (−L, −L_σ, V, W) 로 최소 차수 모델을 복원한다. 그러나 2차 시스템에 직접 적용하면 질량·강성·감쇠 행렬의 구조가 손실된다.
이를 해결하기 위해 저자들은 2차 시스템을 1차 형태로 확장한 뒤, 레이리 파라미터 α,β 가 알려진 경우 새로운 “SO Loewner 행렬” L_SO와 L_SOσ 를 정의한다. 구체적으로, 스칼라 함수 d(s)=1+βs, n(s)=s²+αs, f(s)=n(s)d(s) 를 도입하고, 데이터 포인트 λ_i (오른쪽)와 µ_j (왼쪽) 에 대해 다음과 같이 행렬 원소를 구성한다.
L_SO(i,j) =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기