동적 휴머노이드 보행을 위한 모션 디커플링과 차원 축소 모델 최적화 기반 힘 제어
본 논문은 3차원 휴머노이드 보행을 주기적·전이적 움직임으로 분리하고, 각각을 전·후방 평면의 2차원 보행으로 다시 분해한다. 차원 축소 모델인 구동형 스프링‑로드 인버티드 펜듈럼(aSLIP)과 하이브리드 선형 인버티드 펜듈럼(H‑LIP)을 활용해 원하는 중심질량(COM) 궤적을 설계한다. 주기적 보행은 무발목(포인트 풋) 모델로 최소 발목 구동을 구현하고, 전이적 보행은 발목 구동 모델로 빠르고 부드러운 전이를 만든다. 평면 COM 동역학을 …
저자: Xiaobin Xiong, Aaron Ames
본 논문은 3차원 휴머노이드 로봇의 보행을 효율적으로 설계·제어하기 위한 새로운 프레임워크를 제시한다. 핵심 아이디어는 보행을 ‘주기적 움직임’과 ‘전이적 움직임’으로 구분하고, 각각을 전·후방 평면의 2차원 보행으로 다시 분해하는 ‘모션 디커플링’이다. 이렇게 하면 각 평면에서 저차원 모델(ROM)을 적용해 복잡한 전신 동역학을 대신할 수 있다.
사용된 ROM은 두 종류다. 첫 번째는 구동형 스프링‑로드 인버티드 펜듈럼(aSLIP)으로, 비선형 스프링·댐퍼와 다리 길이 구동을 포함한다. aSLIP은 포인트 풋(발바닥이 점) 형태와 발목 구동이 가능한 foot‑actuated 형태로 구현된다. 포인트 풋 aSLIP은 주기적 전방 보행을 설계하는 데 사용되며, 발목 구동이 없으므로 최소한의 관절 토크로 자연스러운 COM 진동과 인간과 유사한 지면 반작용력을 생성한다. foot‑actuated aSLIP은 전이 단계에서 사용되며, 발목 피치 토크와 다리 길이 가속도를 동시에 최적화해 빠르고 부드러운 상태 전이를 가능하게 한다.
두 번째 ROM은 하이브리드 선형 인버티드 펜듈럼(H‑LIP)이다. 이는 선형 동역학을 갖는 포인트 풋 LIP에 DSP(두 발 접지)와 SSP(단일 발 접지) 구간을 포함한 하이브리드 구조를 추가한 모델이다. H‑LIP은 횡방향(측면) 보행을 담당한다. 포인트 풋 H‑LIP은 폐쇄형 해를 통해 P2(두 단계 주기) 궤적을 식별하고, 원하는 보폭·속도에 맞는 COM 궤적을 생성한다. foot‑actuated H‑LIP은 전이 단계에서 발목 롤 토크를 입력으로 하는 QP 형태의 최적화 문제를 풀어, ZMP와 토크 한계를 만족하면서 목표 상태로 전이한다.
주기적 보행 설계는 직접 콜로케이션(direct collocation) 기반 비선형 최적화로 수행된다. 목적함수는 다리 길이 가속도와 발목 토크의 제곱합을 최소화하며, 제약조건에는 도메인 지속시간, 보폭, COM 높이 범위, 비음성 접촉력, 마찰원뿔, 스프링 변위 제한 등이 포함된다. 최적화는 IPOPT을 사용해 1~2초 내에 수렴한다. 전이 최적화는 foot‑actuated aSLIP에 ZMP 제약과 발목 토크 제한을 추가하고, 초기·최종 상태를 로봇의 실제 관절 상태와 일치하도록 설정한다. 측면 전이는 선형 동역학 덕분에 QP로 빠르게 해결된다.
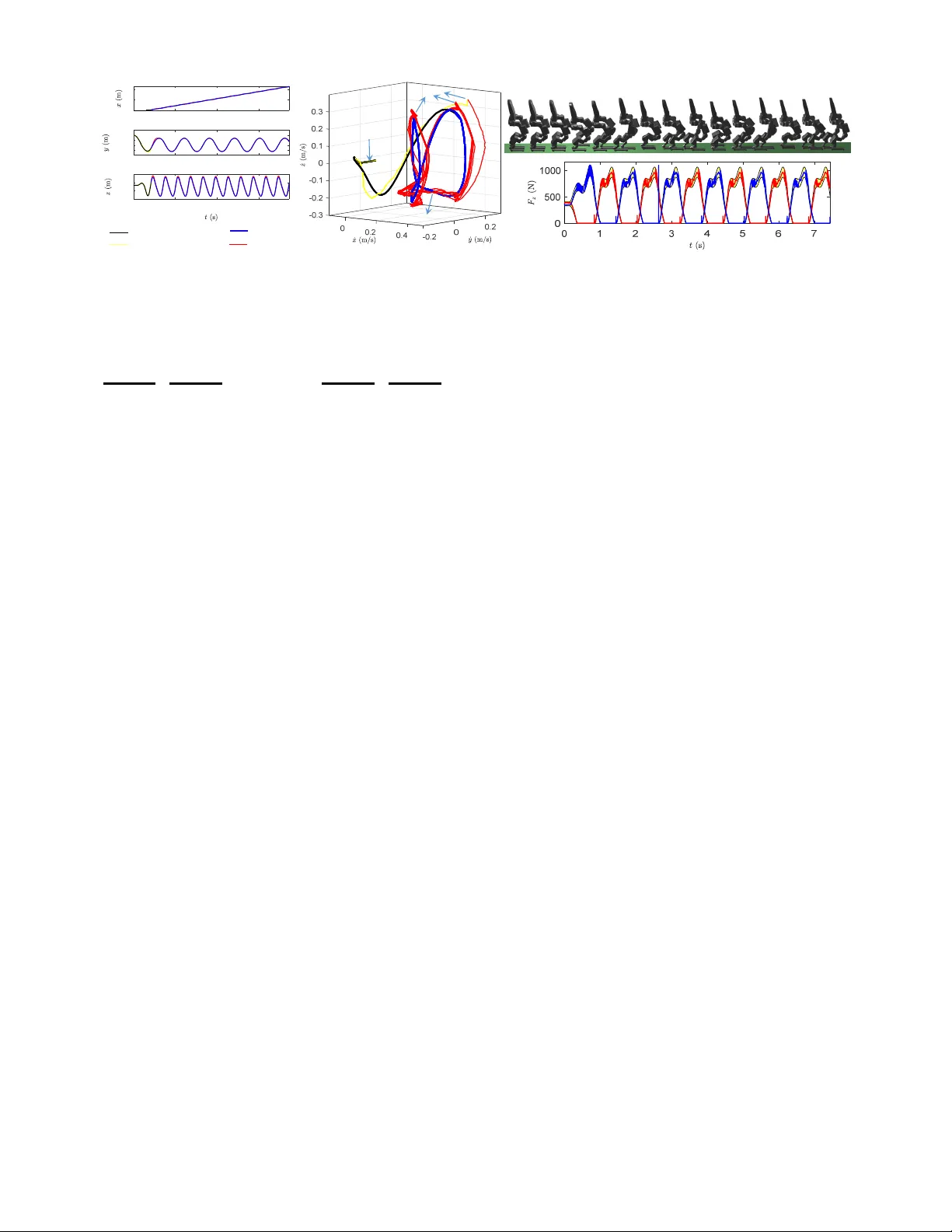
설계된 평면 COM 궤적을 시간 동기화해 3‑D COM 궤적을 만든 뒤, 이를 제어 Lyapunov 함수 기반 이차계획법(CLF‑QP)으로 로봇에 임베딩한다. CLF‑QP는 전체 로봇 동역학을 안정화하면서, aSLIP에서 얻은 목표 지면 반작용력(Fz) 프로파일을 추종하도록 힘 제어를 포함한다. 이렇게 하면 도메인 전이 시 급격한 힘 변화를 완화하고, 부드러운 접촉 전이를 보장한다.
시뮬레이션은 인간형 다리 구조를 가진 하체 외골격(Exo)을 대상으로 수행되었다. 외골격은 힙 3‑DOF, 무릎 1‑DOF, 발목 2‑DOF를 갖고, 각 발에 4개의 로드셀로 접촉력을 측정한다. 시뮬레이션 결과는 다양한 보행 속도(0.5~1.5 m/s)와 보폭, 전이 시나리오(정지→보행, 보행→정지, 보행→보행)에서 성공적인 실행을 보여준다. 포인트 풋 모델만 사용할 경우 발목 구동이 없으므로 토크 요구가 낮지만 전이 시 급격한 COM 변동이 발생한다. 반면 foot‑actuated 모델과 CLF‑QP 힘 제어를 결합하면 전이 시 COM과 지면 반작용력이 매끄럽게 변하며, 실제 로봇 관절 토크와도 일치한다.
결론적으로, 이 논문은 차원 축소 모델과 CLF‑QP 기반 힘 제어를 결합해 고차원 휴머노이드 보행 제어의 계산 복잡성을 크게 낮추면서도 인간에 가까운 동적 보행을 구현하는 실용적인 방법을 제시한다. 향후 실제 로봇 실험과 온라인 최적화 적용을 통해 실시간 보행 제어로 확장할 가능성이 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기