협동형 수동 코히런트 위치 측정: 5G 기반 도로 안전 혁신
초록
본 논문은 5G 네트워크를 활용한 협동형 수동 코히런트 위치 측정(CPCL) 개념을 제안한다. CPCL은 기존 수동 레이더(PCL)의 한계를 극복하고, 통신망의 기지국·단말을 레이더 노드로 활용해 분산 MIMO 레이더 서비스를 제공한다. 동기화·자원 할당·엣지 컴퓨팅을 결합해 고해상도 거리·속도 정보를 실시간으로 얻으며, 통신 주파수와 하드웨어를 이중 활용함으로써 친환경적·경제적 이점을 갖는다. 특히 V2X 환경에서 도로 상황 인식과 충돌 방지를 지원한다.
상세 분석
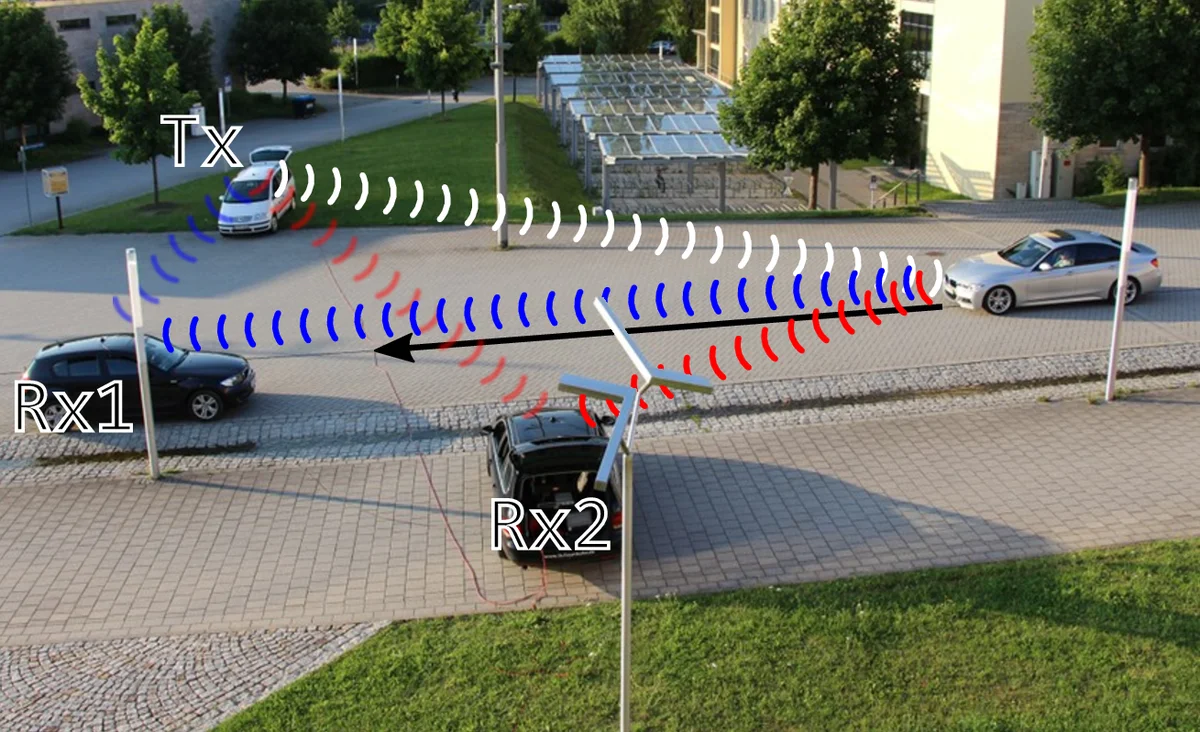
CPCL(Cooperative Passive Coherent Location)은 기존 수동 레이더(PCL)의 “전송기‑수신기 독립” 구조를 깨고, 5G 통신망의 모든 무선 노드를 레이더의 Illuminator와 관측기(Observer)로 전환한다는 점에서 혁신적이다. 이때 네트워크는 단일 운영자에 의해 관리되므로 시간·주파수 동기화가 보장되고, MAC 계층에서 자원 충돌을 최소화할 수 있다. 5G의 핵심 기술—대규모 MIMO, OFDMA/FB‑OFDMA, 캐리어 결합·채널 결합, 저지연 MEC—이 모두 CPCL의 파라미터 추정, 빔포밍, 실시간 데이터 융합에 직접 활용된다.
신호 처리 측면에서는 OFDM 기반 통신 신호를 그대로 레이더 파형으로 이용한다. 기존 통신 수신 체인(동기화 → CP 제거 → FFT → 채널 추정 → 등화) 뒤에 역필터링·IFFT를 삽입해 채널 임펄스 응답을 복원하고, 이를 “fast time”(거리) 축으로, 연속 OFDM 심볼에 대한 FFT를 적용해 “slow time”(도플러) 축으로 변환한다. 이렇게 얻어진 2‑D delay‑Doppler 스펙트럼은 목표물의 거리·속도 정보를 제공한다. 다중 사용자 PRB가 시간·주파수에 산재하는 LTE‑Advanced/5G 자원 그리드에서는 희소 샘플링에 따른 앰비규어티 함수의 변형이 발생하지만, CPCL은 네트워크 차원에서 자원 배치를 조정하거나, 누락된 PRB를 보간하는 알고리즘을 적용해 성능 저하를 완화한다.
또한 CPCL은 레이더‑통신 융합을 통해 “그린 레이더”를 구현한다. 동일 주파수 대역과 RF 하드웨어를 공유함으로써 별도 레이더 전용 스펙트럼을 할당받을 필요가 없으며, 기지국·단말의 대량 배치 덕분에 커버리지가 자연스럽게 확대된다. MEC에서 수행되는 실시간 데이터 융합은 다중 관측점(차량, RSU, 기지국)으로부터 얻은 거리·속도·위치 정보를 지도·교통 상황 데이터와 결합해 고신뢰성 교통 상황 인식을 가능하게 한다.
핵심 과제로는 (1) 고동적 목표에 대한 빠른 채널 추정과 높은 동적 범위 확보, (2) 다중 사용자 자원 스케줄링과 레이더 전용 PRB 보장, (3) 전파 다중 경로와 클러터링 환경에서의 잡음 억제, (4) 프라이버시·보안 문제, (5) 대규모 실증 테스트와 표준화가 있다. 특히 전파 환경이 복잡한 도심에서는 다중 경로가 레이더 스펙트럼에 혼란을 초래할 수 있으므로, 빔포밍·공간 필터링과 머신러닝 기반 클러스터링 기법이 필요하다.
전반적으로 CPCL은 5G 인프라를 레이더 플랫폼으로 전환함으로써, 기존 레이더 시스템이 직면한 스펙트럼·하드웨어 비용 문제를 해결하고, V2X 및 ITS 분야에서 실시간 고정밀 위치·속도 정보를 제공하는 새로운 서비스 패러다임을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기