약한 감독 항공기 궤적 계획을 통한 차세대 항공교통 관리
본 논문은 항공교통관제(ATC)가 항공기 개별 궤적을 완전히 지정하는 대신, 안전을 보장하는 허용 궤적 집합(디스크)을 제공하고 조종사가 자신의 목표(연료 절감·도착시간 최소화 등)에 맞춰 선택하도록 하는 ‘약한 감독(weak control)’ 기반 ATM 프레임워크를 제안한다. ATC는 충돌 회피와 DOF(자유도) 극대화를 목표로 궤적 집합을 최적화하고, 조종사는 제공된 집합 내에서 개인 목적을 달성하는 최적화 문제를 해결한다. 실제 일본 공…
저자: Sho Yoshimura, Masaki Inoue
본 논문은 항공교통관리(ATM) 시스템의 기존 구조적 한계를 극복하기 위해 ‘약한 감독(weak control)’ 기반의 새로운 프레임워크를 제안한다. 전통적인 ATM은 관제관(ATC)이 각 항공기의 궤적을 완전히 설계하고 파일럿에게 강제하는 방식으로, 항공량 증가에 따라 관제관의 작업 부하가 급증하고, 파일럿·항공사는 연료 비용·시간 지연 등 운영 효율성을 희생해야 하는 구조적 모순을 안고 있다. 이를 해결하고자 저자는 ATC가 안전을 보장하는 허용 궤적 집합(디스크)을 제공하고, 파일럿이 자신의 목표에 맞춰 해당 집합 내에서 궤적을 선택하도록 하는 두 단계(ATC‑제공 → 파일럿‑선택) 프로세스를 설계한다.
**1. 현재 ATM 시스템 분석**
- 전체 공역을 여러 구역으로 분할하고, 각 구역마다 독립적인 ATC가 수동으로 궤적을 설계한다.
- 관제관은 레이더 기반 위치 정보만을 활용해 충돌 회피와 안전을 확보하지만, 파일럿의 연료 절감·시간 최적화 요구를 반영하기 어렵다.
**2. 약한 감독 프레임워크 제안**
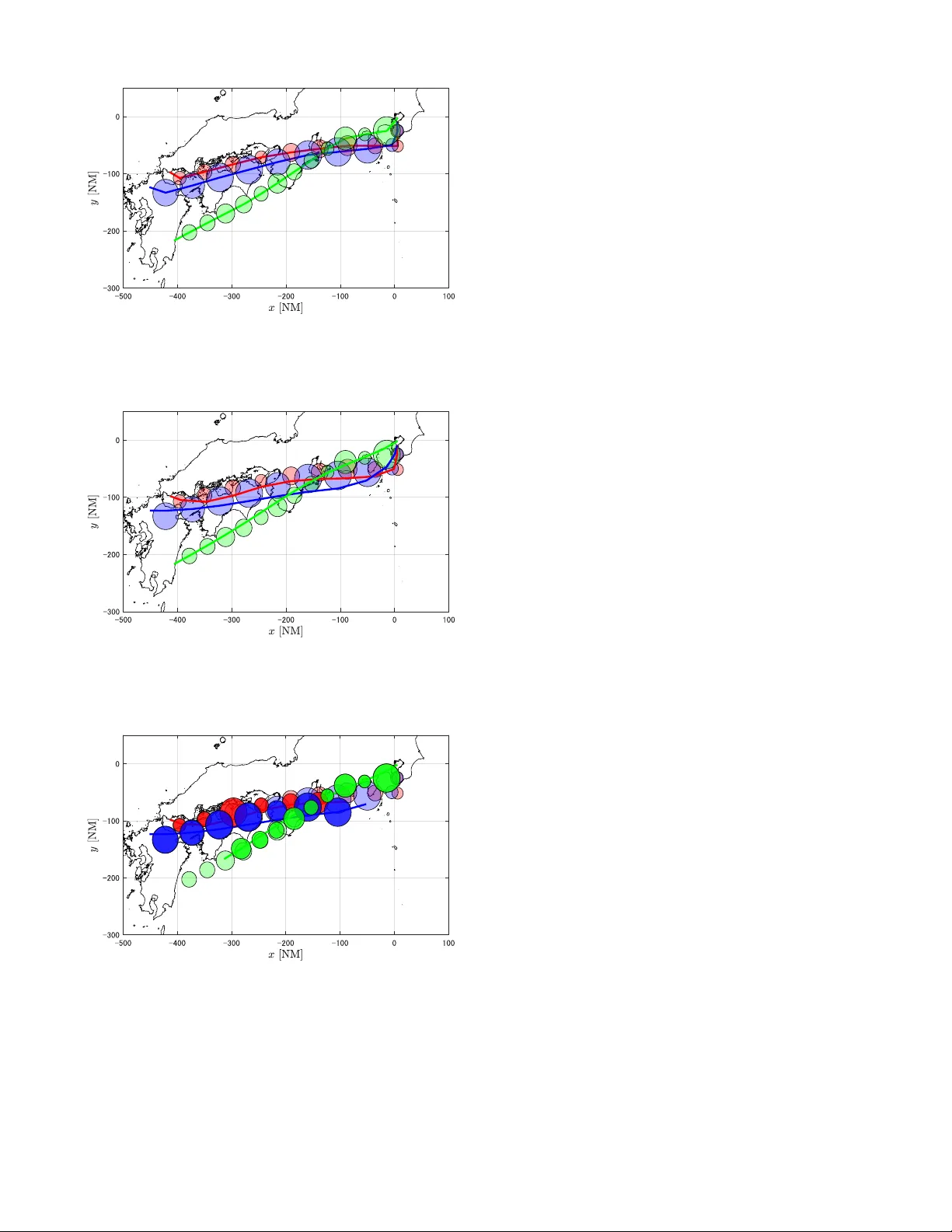
- ATC는 각 항공기에 대해 시간‑별 허용 영역을 원형 디스크(W_i(k) = {C_i(k), r_i(k)}) 형태로 정의한다.
- 디스크의 중심 C_i(k)와 반경 r_i(k)는 최적화 문제를 통해 결정되며, 목표는 (i) 자유도(반경)의 합을 최대화, (ii) 표준 궤적과의 편차 최소화, (iii) 충돌 회피와 물리적 제약 만족이다.
- 파일럿은 제공된 디스크 집합 내에서 연료 소모, 도착시간 변동성, 기상 조건 등을 고려한 비용 함수를 최소화하는 독립적인 최적화 문제를 해결한다.
**3. ATC 측 최적화 모델**
- 결정 변수: 속도 차이 u_i(k), 각도 차이 ψ_i(k), 디스크 반경 r_i(k).
- 비용 함수 J_ATC = J1 + α·J2, 여기서 J1 = -∑_i∑_k ln(r_i(k)+ε) 로 반경을 로그 형태로 보상해 수치적 안정성을 확보하고, J2는 중심 편차와 연속성(Δ) 제곱합으로 현실적인 궤적을 유도한다.
- 제약조건: (a) 항공기 동역학(속도·각도 변화), (b) 속도·각도 제한, (c) 최종 상태 제약(V_ter, Θ_ter), (d) 충돌 회피 제약 ‖C_i(k)-C_j(k)‖ ≥ r_i(k)+r_j(k)+D, (e) 디스크 인접 거리 제약(실현 가능성 보장), (f) 재계획 시 연속성 제약.
**4. 파일럿 측 최적화 모델**
- 입력: 초기·최종 상태, ATC가 제공한 디스크 집합, 외부 교란·기상 데이터.
- 목표: 연료 비용, 도착시간 변동성 등 운영 목적을 최소화하는 궤적 ˆC_i(k) 선택.
- 파일럿은 상세 항공기 모델과 기상 정보를 활용하지만, ATC는 이러한 정보를 알 필요가 없어 정보 비대칭을 최소화한다.
**5. 시뮬레이션 및 검증**
- 2015년 5월 11일 일본 공역의 CARA‑TS Open Data(실제 IFR 상업 비행 데이터)를 사용해 시뮬레이션을 수행.
- 기존 관제 방식과 비교했을 때, 충돌 회피는 동일하게 유지하면서 평균 연료 소모가 3~5% 감소하고, 파일럿이 선택한 궤적의 자유도(디스크 반경)의 평균값이 크게 증가함을 확인.
- 재계획 실험에서도 이전에 선택된 궤적을 기반으로 새로운 디스크를 생성함으로써 연속성을 유지하고, 급변하는 교통 상황에 대한 적응성을 확보하였다.
**6. 기존 코리도(air corridor)와의 차별점**
- 기존 코리도는 파일럿이 직접 충돌 회피와 협상을 해야 하는 반면, 약한 감독 프레임워크는 충돌 회피를 ATC가 사전 보장하고 파일럿은 순수히 운영 목표에 집중한다. 따라서 시스템 전체의 안전성은 유지하면서도 운영 효율성을 크게 향상시킬 수 있다.
**7. 결론 및 향후 연구**
- 제안된 약한 감독 기반 ATM은 안전성 보장을 전제로 파일럿·항공사의 운영 효율성을 동시에 달성할 수 있는 실용적인 방안이다.
- 향후 연구에서는 3차원 궤적 확장, 실시간 기상 변동에 대한 적응형 재계획, 다중 항공기 간 협력·경쟁 메커니즘 도입 등을 통해 시스템의 확장성을 검증할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기