연속시간 동적 구현을 통한 비선형 안정화와 제어 수축 계량
본 논문은 제어 수축 계량(CCM) 기반 비선형 시스템 안정화에서 필수적인 최소 지오데식 계산을 실시간 최적화 없이 수행하기 위해, 내부 경로 상태를 연속시간 동적 시스템으로 설계한다. 경로 상태는 공변 미분 정보를 이용해 지오데식으로 수렴하도록 흐르게 하며, Chebyshev 다항식 기반의 유한 차원 근사로 구현한다. 명시적 정리와 수치 예제를 통해 전역 지수 안정성과 강인성을 보장한다.
저자: Ruigang Wang, Ian R. Manchester
본 논문은 비선형 시스템의 전역적인 궤적 안정화를 목표로 하는 제어 수축 계량(Control Contraction Metric, CCM) 방법의 실시간 적용 문제를 해결하고자 한다. 기존 CCM 기반 제어는 목표 상태와 현재 상태 사이의 최소 지오데식(최단 경로)을 매 순간 온라인 최적화 문제를 통해 구해야 하는데, 이는 차원은 낮지만 여전히 실시간 제어에 부담이 된다.
1. **배경 및 기존 연구**
- 비선형 시스템을 선형화하여 LPV(LPV) 제어를 적용하거나, NMPC와 같이 최적화 기반 제어를 사용하는 방법이 있다. 그러나 전자는 전역 안정성을 보장하지 못하고, 후자는 계산량이 커서 실시간 적용이 어렵다.
- CCM은 Riemannian 계량 M(x)를 정의하고, 두 상태 사이의 Riemannian 에너지 E(c)=∫₀¹‖c_s‖_M² ds가 미분 피드백 δu=K(x)δx에 의해 지수적으로 감소하도록 설계한다. 이때 K(x)=Y(x)W⁻¹(x)이며, W, Y는 LMI(6)을 만족하는 행렬이다.
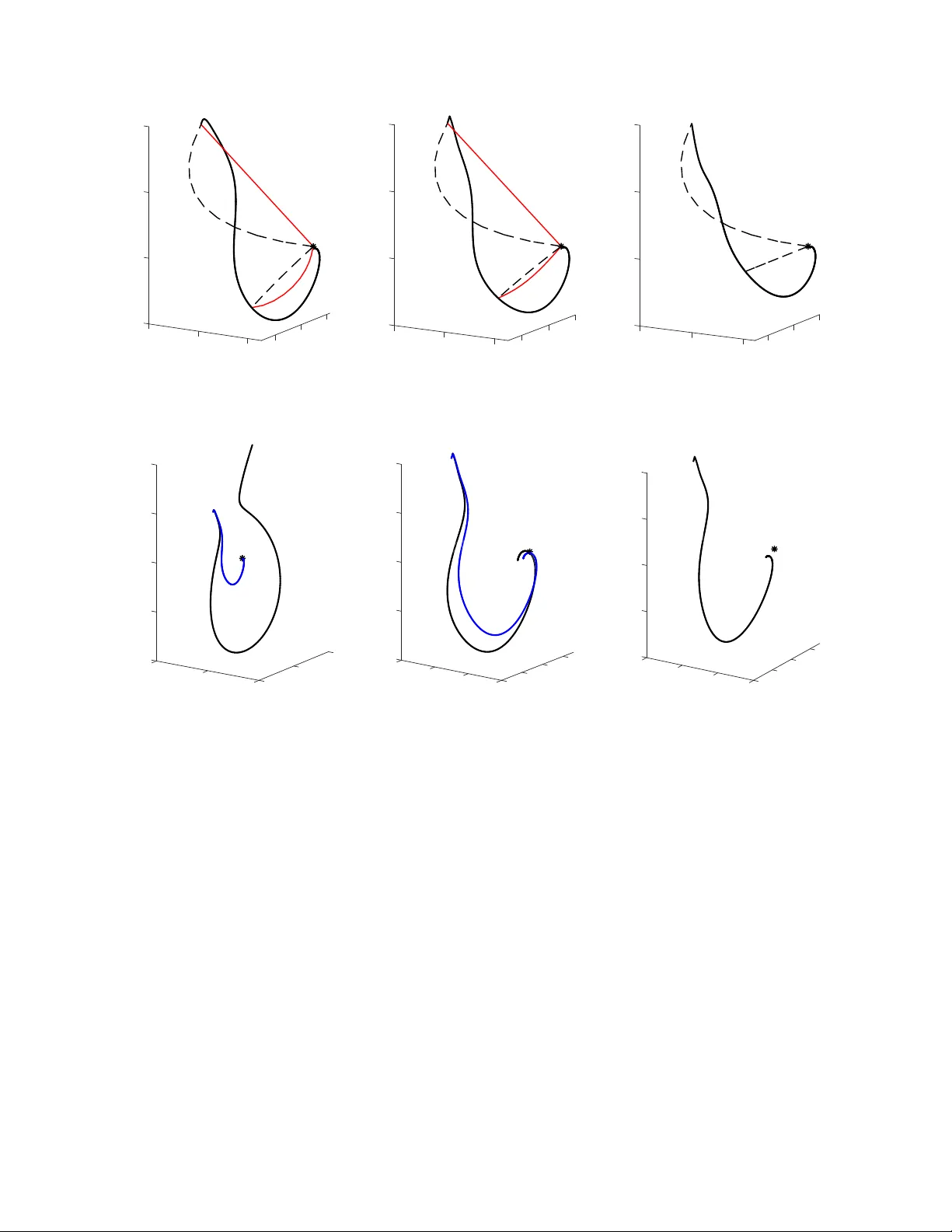
- 정적 구현에서는 (i) 현재 상태와 목표 상태 사이의 최소 지오데식 γ(t)를 구하고, (ii) γ 위에서 미분 피드백을 적분해 제어 입력을 얻는다. 단계 (i)가 실시간 최적화 문제이므로, 이를 대체할 방법이 필요하다.
2. **연속시간 동적 구현 제안**
- 내부 상태를 경로 c(t,·)로 두고, 플랜트의 흐름을 따라가면서 동시에 공변 미분 ∇_{c_s}c_s를 이용해 경로를 지오데식 방향으로 끌어당긴다. 구체적인 동역학은
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기