센서 기반 신경망 적응형 비트레이트 영상 스트리밍 드론
본 논문은 UAV(드론)의 비행 상태를 나타내는 GPS, 가속도, 속도 등 내장 센서 데이터를 활용해 네트워크 관측과 결합한 딥 강화학습(Deep Reinforcement Learning) 기반 적응형 비트레이트(ABR) 알고리즘을 설계한다. LSTM을 이용해 과거 스루풋의 시간적 특성을 학습하고, 센서 데이터는 양자화 전처리 후 신경망에 투입한다. 실제 DJI Matrice 100에 구현한 결과, 기존 최첨단 ABR 알고리즘 대비 평균 QoE…
저자: Xuedou Xiao, Wei Wang, Taobin Chen
본 논문은 UAV(무인항공기)와 지상 단말 간 실시간 고화질 영상 스트리밍을 위한 새로운 적응형 비트레이트(ABR) 알고리즘인 SA‑ABR을 제안한다. 기존 ABR는 주로 지상‑지상 링크를 전제로 설계돼, UAV가 겪는 급격한 채널 변동(거리 변화, 고속 이동, 진동 등)에 적절히 대응하지 못한다. 저자들은 UAV에 내장된 GPS, 관성계측장치(IMU) 등 15가지 비행 상태 센서를 활용해, 이러한 물리적 정보를 네트워크 관측과 결합함으로써 채널 용량을 보다 정확히 예측하고자 한다.
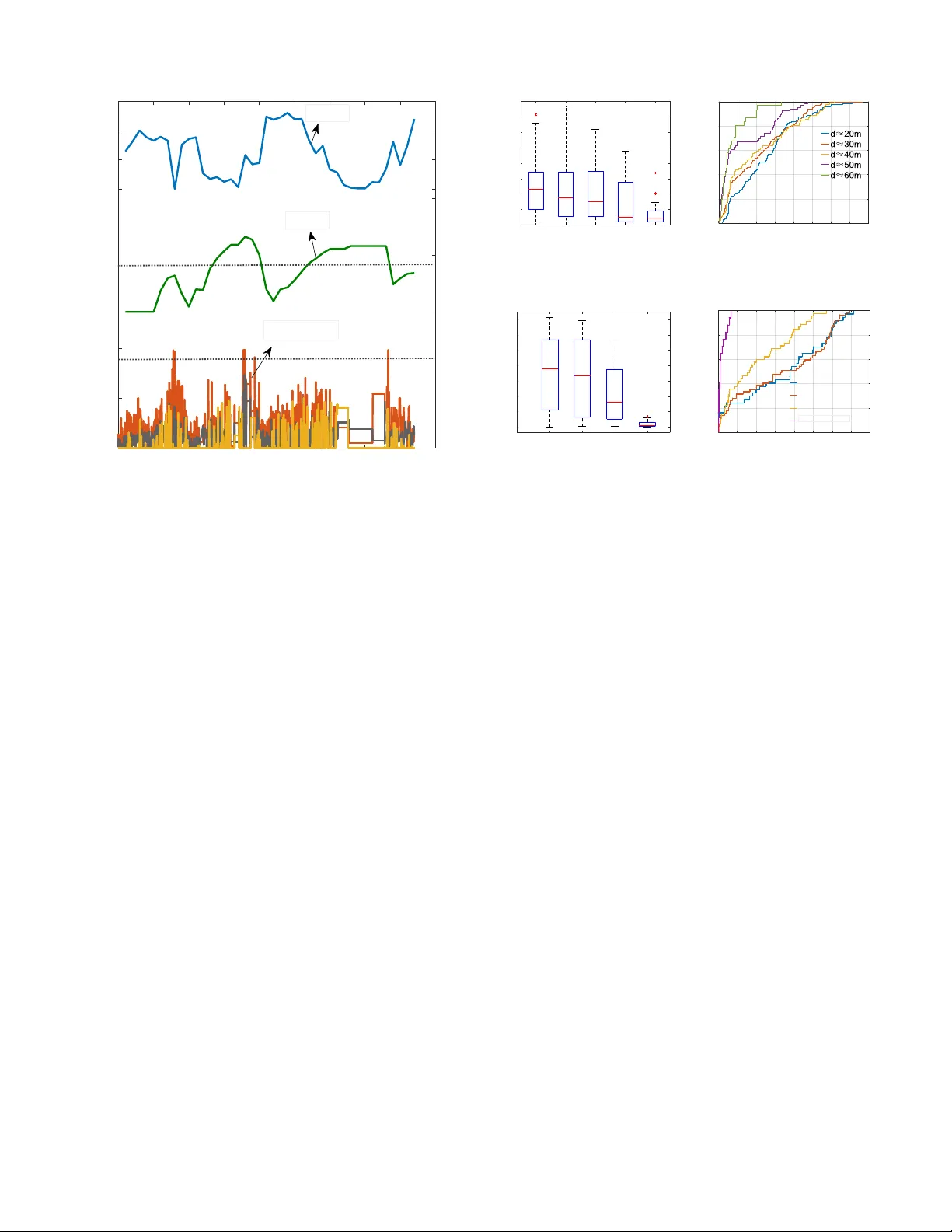
먼저, 저자들은 거리·속도·가속도가 스루풋에 미치는 영향을 정량화하기 위해 제어된 실험을 수행했다. 거리 10 ~ 60 m, 속도 0 ~ 16 m/s 범위에서 스루풋이 단조 감소함을 확인했으며, 가속도 변동이 급격히 증가할 때 스루풋 저하가 선행한다는 사실을 발견했다. 그러나 실제 비행에서는 거리·속도·가속도가 복합적으로 작용해 단순 선형 관계가 깨지는 경우가 많았다. 특히 가속도 데이터는 UAV 자체 진동과 비행 상태 변화를 동시에 반영해, 원시 데이터를 그대로 사용하면 학습이 혼란스러워진다.
이를 해결하기 위해 SA‑ABR은 센서 데이터를 양자화(quantization) 전처리하여 노이즈를 억제하고, DRL 에이전트의 상태 입력에 포함한다. 에이전트는 PPO 기반 정책·가치 네트워크와 LSTM 레이어를 결합해, 과거 스루풋 시퀀스의 장기 의존성을 학습한다. LSTM은 시간적 패턴을 포착해 미래 스루풋을 예측하고, 예측된 채널 용량에 맞춰 다음 청크의 비트레이트를 선택한다. 보상 함수는 전통적인 QoE 모델(영상 품질, 재버퍼링 시간, 품질 변동성)을 사용하며, 센서 기반 예측 정확도가 높아질수록 재버퍼링 위험이 감소하고 전반적인 QoE가 향상된다.
시스템 구현은 DJI Matrice 100에 라즈베리 파이와 Wi‑Fi 모듈을 탑재하고, ROS 기반 노드로 센서 수집·전처리·DRL 추론·비디오 인코딩 파이프라인을 연결했다. 실험은 캠퍼스 내 놀이터, 광장, 수영장 등 3개 장소에서 정지·일정 속도 이동·임의 경로 비행을 포함한 다양한 시나리오로 진행되었다. 비교 대상은 B‑BR, FESTIVE, MPC‑ABR, 그리고 최신 딥러닝 기반 ABR인 Pensieve 등이다. 결과는 SA‑ABR이 평균 QoE 보상에서 기존 최고 성능 알고리즘 대비 21.4 % 향상을 달성했으며, 특히 고속 이동·거리 변동이 큰 상황에서 재버퍼링 횟수를 크게 줄였다.
논문의 주요 기여는 다음과 같다. 첫째, UAV 비행 상태와 무선 채널 간의 정량적 관계를 실험적으로 규명하였다. 둘째, 센서 데이터를 DRL‑ABR에 효과적으로 통합하기 위한 양자화·LSTM 기반 아키텍처를 제안하였다. 셋째, 실제 드론에 구현·실험을 통해 상용 ABR 대비 실질적 성능 향상을 입증하였다. 한계점으로는 양자화 과정에서 발생할 수 있는 정보 손실, LSTM 학습에 요구되는 계산·전력 비용, 그리고 다양한 UAV 플랫폼에 대한 일반화 가능성 등을 들 수 있다. 향후 연구에서는 경량화된 시계열 모델, 멀티‑센서 융합 기법, 그리고 5G·mmWave 등 고주파 대역에 대한 확장성을 탐색할 필요가 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기