좌불변 다중 에이전트 시스템에서 상대 위치 관측 가능성과 형성 제어로의 적용
초록
본 논문은 로봇 군집이 형성 제어 알고리즘을 실행할 때 필요한 이웃 간 상대 위치 정보를 직접 측정할 수 없는 상황을 다룹니다. 상대 운동학을 좌불변 제어 시스템으로 모델링하여, 거리 측정과 같은 다른 관측값만으로 상대 위치를 재구성하는 관측 가능성 문제를 해결합니다. 이를 거리 기반 형성 제어에 적용하여 강건성 문제를 분석하고 해결 방안을 제시합니다.
상세 분석
본 논문의 핵심 기술적 기여는 다중 에이전트 시스템의 상대 운동학을 Lie 군 이론을 활용한 좌불변(left-invariant) 제어 시스템으로 정식화한 데 있습니다. 각 에이전트의 로컬 프레임과 이웃 에이전트 간의 상대 위치를 Lie 군 G_i = SE(2n_i)의 부분군으로 표현합니다. 이 모델은 시스템 동역학을 비선형 군 다양체에서 선형 Lie 대수 공간으로 변환시키는 좌표 불변의(coordinate-free) 표현을 제공하며, 이는 전역적으로 잘 정의된 동작을 보장하는 데 필수적입니다.
관측 가능성 분석을 위해, 논문은 좌불변 벡터 장에 대한 출력 함수(예: 에이전트 간 거리)의 반복된 Lie 도함수로 구성된 관측 공간(Observation Space) O를 정의합니다. 주요 정리(Theorem 3.1)에 따르면, 어떤 상태 g에서 관측 공간의 미분 dO(g)의 차원이 군 G의 차원과 같을 때 시스템은 국소적으로 관측 가능합니다. 이 프레임워크는 특정 센서 유형에 제한되지 않고, 여러 다른 관측 함수의 조합을 분석할 수 있는 일반성을 가집니다.
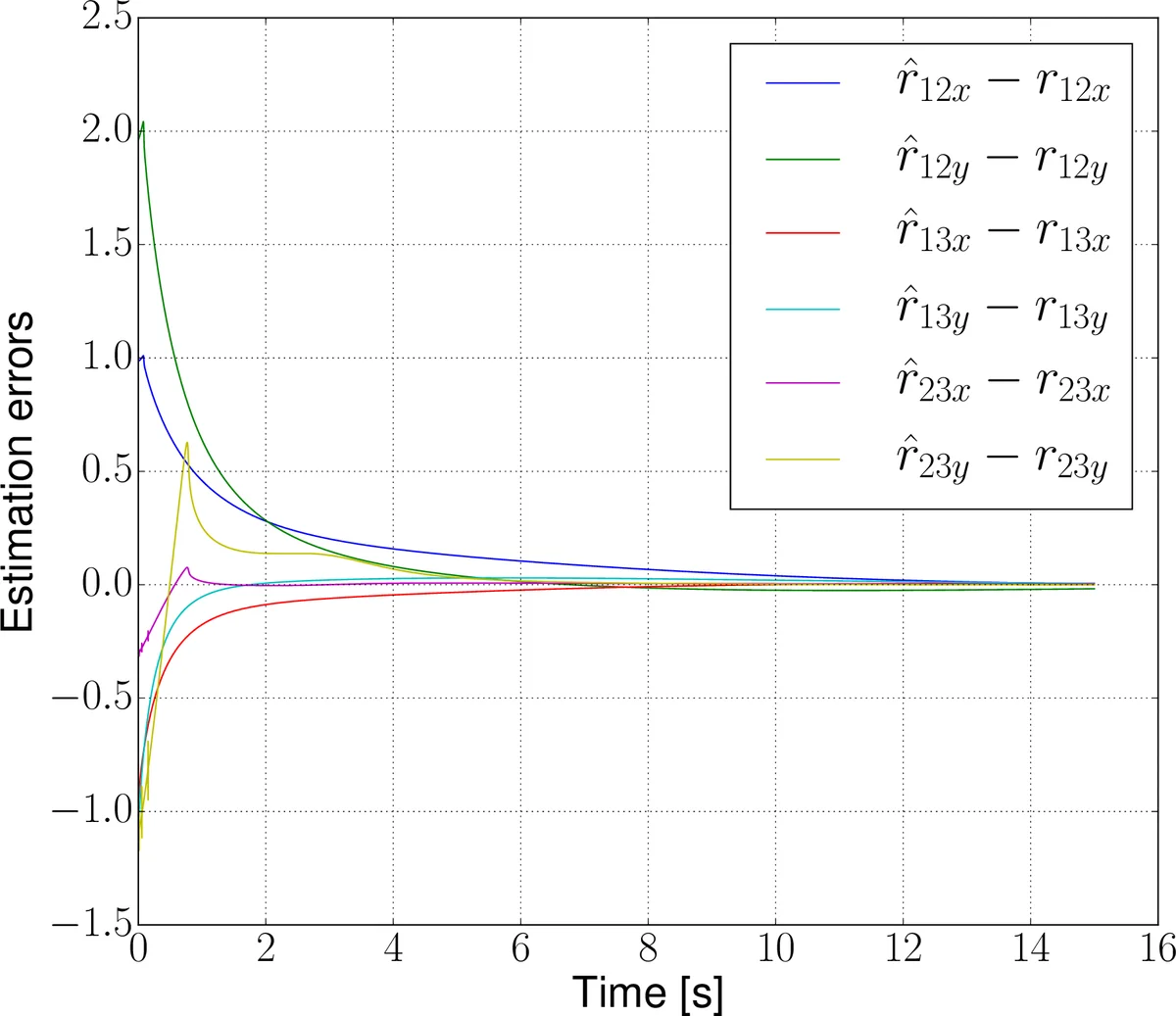
응용 부분에서는 에이전트가 상대 위치는 알 수 없지만 이웃과의 거리는 측정할 수 있는 거리 기반 형성 제어 시나리오를 집중적으로 분석합니다. 여기서 중요한 통찰은, 원하는 형상(formation shape)을 달성하는 것이 상대 위치의 정확한 추정을 보장하지 않는다는 점입니다. 관측기(예: 칼만 필터)와 제어기의 결합은 시스템에 불안정한 초점(unstable focus)이나 원하지 않는 운동을 유발하는 부적절한 정상 상태를 생성할 수 있으며, 이는 무방향 형성의 강건성 문제와 연결됩니다. 논문은 올바른 상대 위치 추정과 형상 제어를 동시에 달성하기 위한 구현 기법을 제안하여 이 문제를 해결합니다.
댓글 및 학술 토론
Loading comments...
의견 남기기