불확실한 리더 시스템을 위한 적응형 분산 관측기와 다중 Euler‑Lagrange 시스템의 리더‑팔로잉 합의
초록
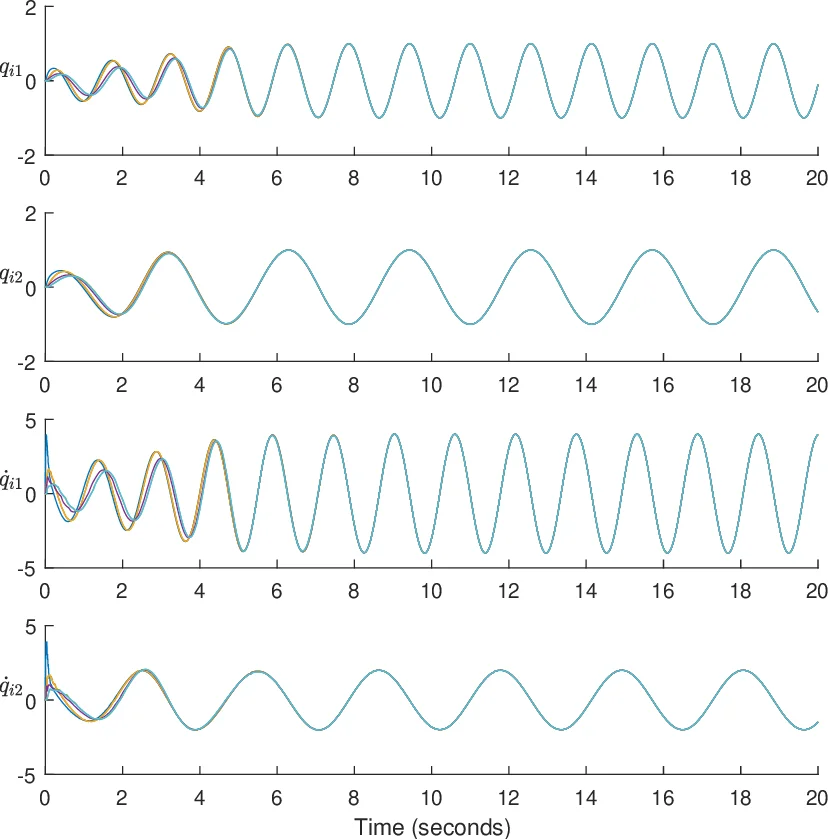
본 논문은 리더 시스템의 상태 행렬이 정확히 알려지지 않은 경우에도, 각 팔로워가 리더의 상태를 정확히 추정하고 따라갈 수 있도록 하는 적응형 분산 관측기와 이를 기반으로 한 적응형 분산 제어법을 제시한다. 리더가 중립 안정(neutrally stable) 선형 시스템이며, 리더 신호가 지속적으로 흥분(persistently exciting)하면 행렬 파라미터까지 학습한다. 이를 통해 다중 Euler‑Lagrange 로봇 시스템이 알 수 없는 다중톤 사인파 신호를 정확히 추종하도록 보장한다.
상세 분석
본 연구는 두 단계로 구성된다. 첫 번째 단계는 리더 시스템이 ( \dot v = S(\omega)v,; q_0 = Cv ) 형태의 중립 안정 선형 시스템일 때, (S(\omega)) 가 완전히 미지인 상황에서도 각 팔로워가 리더 상태 (v) 를 분산적으로 추정하도록 설계된 적응형 분산 관측기 (8)를 제시한다. 기존의 분산 관측기 (6)는 (S(\omega)) 를 직접 이용해야 했으나, 여기서는 (\omega_i) 를 각 에이전트가 자체적으로 업데이트하는 (\dot\omega_i = \mu_2\phi(e_{v_i})\eta_i) 식을 도입함으로써 리더 행렬 파라미터에 대한 의존성을 제거한다. 핵심 아이디어는 (\phi(\cdot)) 함수가 (x^TS(z)y = z^T\phi(x)y) 라는 관계를 만족한다는 점을 이용해 (\dot\omega_i) 식이 (e_{v_i})와 (\eta_i) 의 외적 형태로 표현되도록 만든 것이다. 이렇게 하면 (\omega_i) 는 (e_{v_i}) (이웃 간 상태 차)와 (\eta_i) (자신의 추정 상태)만을 이용해 적응적으로 수렴한다.
Lyapunov 함수 (V = \frac12\tilde\eta^T(H\otimes I_m)\tilde\eta + \frac{1}{2\mu}\tilde\omega^T\tilde\omega) 를 정의하고, (\dot V) 을 전개하면 (-\mu_1\tilde\eta^T(H^2\otimes I_m)\tilde\eta) 와 (-\tilde\omega^T\phi_d(e_v)\eta + \frac{1}{\mu}\tilde\omega^T\dot{\tilde\omega}) 항이 나타난다. 여기서 (\phi_d(e_v)) 는 각 에이전트의 (\phi(e_{v_i})) 를 대각선으로 쌓은 행렬이다. (\dot V) 은 음의 준정부호를 갖고, (\tilde\eta)와 (\tilde\omega) 가 유계이며 (\tilde\eta\to0) 을 보장한다. 추가로 (S_d(\tilde\omega)\eta\to0) 과 (\dot{\tilde\omega}\to0) 을 얻어, (\omega_i) 가 실제 (\omega) 에 수렴함을 증명한다. 이때 (S(\omega)) 가 반대칭(skew‑symmetric)이고 고유값이 반실제(semisimple)이며 실수가 0인 경우(Assumption 2)만 가정한다.
두 번째 단계는 위에서 얻은 추정된 리더 상태 (\hat q_0 = C\eta_i) 와 (\hat{\dot q}_0 = C S(\omega_i)\eta_i) 를 이용해 각 팔로워의 Euler‑Lagrange 동역학 (M_i(q_i)\ddot q_i + C_i(q_i,\dot q_i)\dot q_i + G_i(q_i)=\tau_i) 에 대한 적응형 제어법을 설계한다. 제어 입력은 \
댓글 및 학술 토론
Loading comments...
의견 남기기