대규모 선형 시스템을 위한 분산형 강인 불변 집합 제어기의 합성 설계
본 논문은 상호 연결된 선형 서브시스템들의 네트워크에 대해, 각 서브시스템이 로컬 상태만을 이용해 실행 가능한 분산형 제어기를 설계하는 방법을 제시한다. 설계 과정은 가정‑보장(assume‑guarantee) 계약 형태의 강인 제어 불변(RCI) 집합을 반복적으로 계산함으로써 완전히 합성(compositional)하게 이루어지며, 집합은 줌토포즈(zonotope)로 표현하고 차원 축소 기법을 적용해 계산 복잡성을 억제한다. 1000 차원 규모의…
저자: Kasra Ghasemi, Sadra Sadraddini, Calin Belta
본 논문은 “Compositional Synthesis of Decentralized Robust Set‑Invariance Controllers for Large‑scale Linear Systems”라는 제목의 연구를 한국어로 상세히 요약한다. 연구 배경은 대규모 시스템에서 하드 제약(상태·입력 제한)을 만족시키는 제어기를 설계하는 것이 안전‑중요 분야에서 필수적이라는 점이다. 기존 방법은 RCI(robust control invariant) 집합을 계산해 제어 정책을 도출하지만, (i) 계산 비용이 급증하고, (ii) 얻어진 제어기가 전역 상태에 의존해 중앙집중식이 된다는 두 가지 한계가 있다.
이 논문은 이러한 문제를 해결하기 위해 **합성적(compositional)** 설계 프레임워크를 제안한다. 시스템은 \(I\)개의 서브시스템으로 구성된 네트워크 형태이며, 각 서브시스템 i는
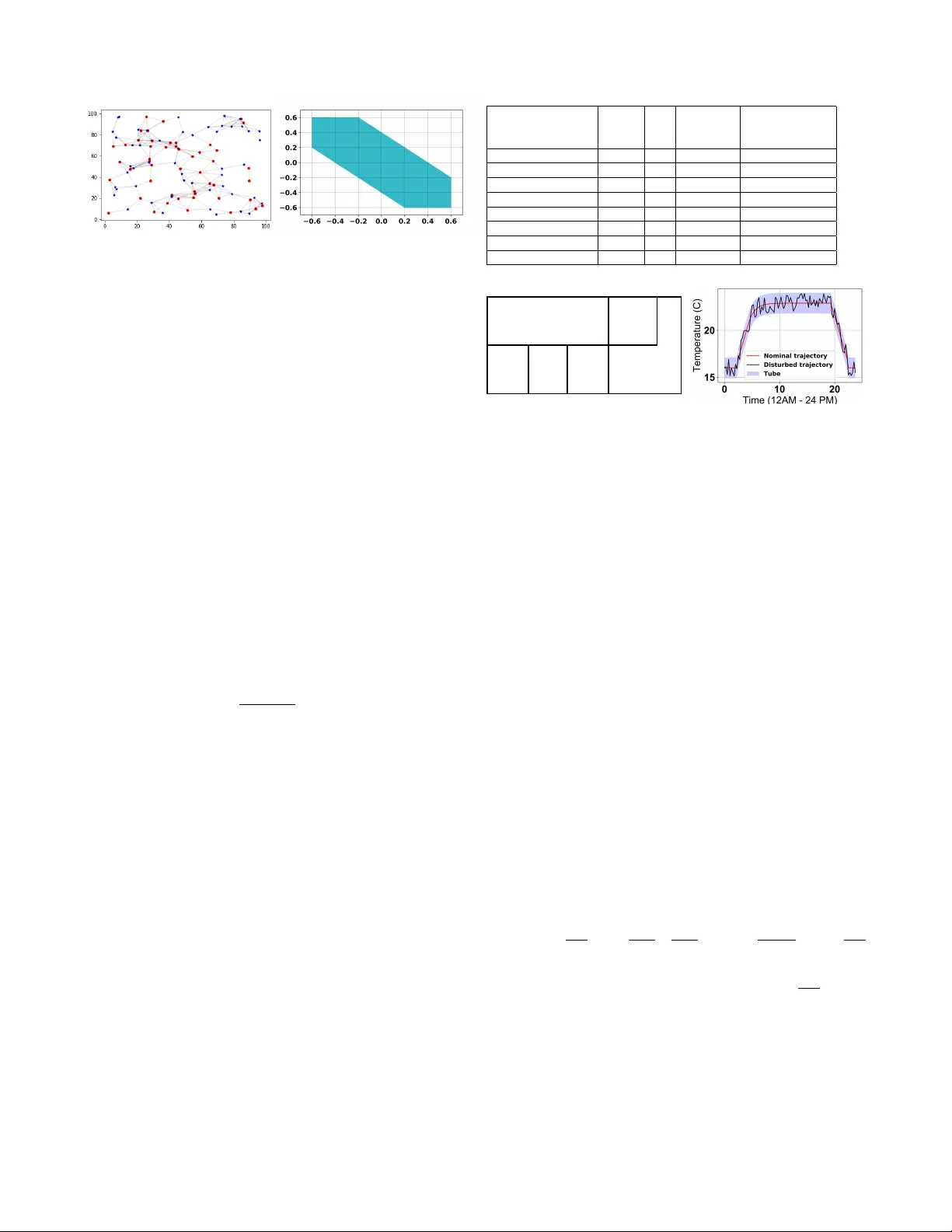
\(x_i(t+1)=A_{ii}x_i(t)+B_{ii}u_i(t)+\sum_{j\neq i}A_{ij}x_j(t)+\sum_{j\neq i}B_{ij}u_j(t)+d_i(t)\)
와 같이 표현된다. 여기서 \(A_{ij},B_{ij}\)는 다른 서브시스템과의 상호작용을 나타내며, 이를 **교란**으로 취급한다.
### 1. 기본 가정 및 수학적 도구
- 모든 서브시스템의 내부 쌍 \((A_{ii},B_{ii})\)는 제어 가능(controllable)이라고 가정한다.
- 상태·입력·교란 제약 집합은 원점 중심의 줌토포즈 \(Z(0,G_{x_i})\), \(Z(0,G_{u_i})\), \(Z(0,G_{d_i})\) 로 표현한다. 줌토포즈는 중심과 생성기 행렬 \(H\) 로 정의되며, 합집합·스칼라 곱·선형 변환이 모두 닫힌 형태이다.
- 줌토포즈 차원(생성기 수) 감소를 위해 ‘박싱(boxing)’ 기법을 사용한다. 이는 줌토포즈를 대각 행렬 형태의 박스로 과대근사해 연산 복잡도를 크게 낮춘다.
### 2. 단일 서브시스템 RCI 집합 계산 (Algorithm 1)
Theorem 1에 따라, 행렬 \(T\in\mathbb{R}^{n_i\times k}\)와 \(M\in\mathbb{R}^{m_i\times k}\)를 찾아
\(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기