소프트 조직 경계 절삭을 위한 토크 기반 이진 분류와 실시간 궤적 보정
** 본 논문은 시각이 차단된 상태에서 연한 조직의 경계(과육·껍질)를 절삭하기 위해, 로봇 관절 토크를 이용한 이진 매질 분류기를 학습하고, 그 확률을 오류 신호로 활용하는 폐쇄‑루프 제어법을 제안한다. 그레이프프루트를 대상으로 한 실험에서, 명시적 궤적만을 따랐을 때 50 % 성공률을 보인 반면, 제안 방법은 72 %의 성공률을 달성하였다. **
저자: Art=uras Straiv{z}ys, Michael Burke, Subramanian Ramamoorthy
**
본 논문은 시각이 차단된 상황에서 연성 조직 사이의 경계를 정확히 절삭하는 문제를 다룬다. 외과 수술이나 식품 가공에서 흔히 발생하는 이 문제는 조직의 비선형·시간변화 특성과 시야 제한으로 인해 기존의 기하학 기반 경로 계획이 실패하기 쉽다. 저자들은 이러한 제약을 극복하기 위해 두 가지 주요 아이디어를 제시한다.
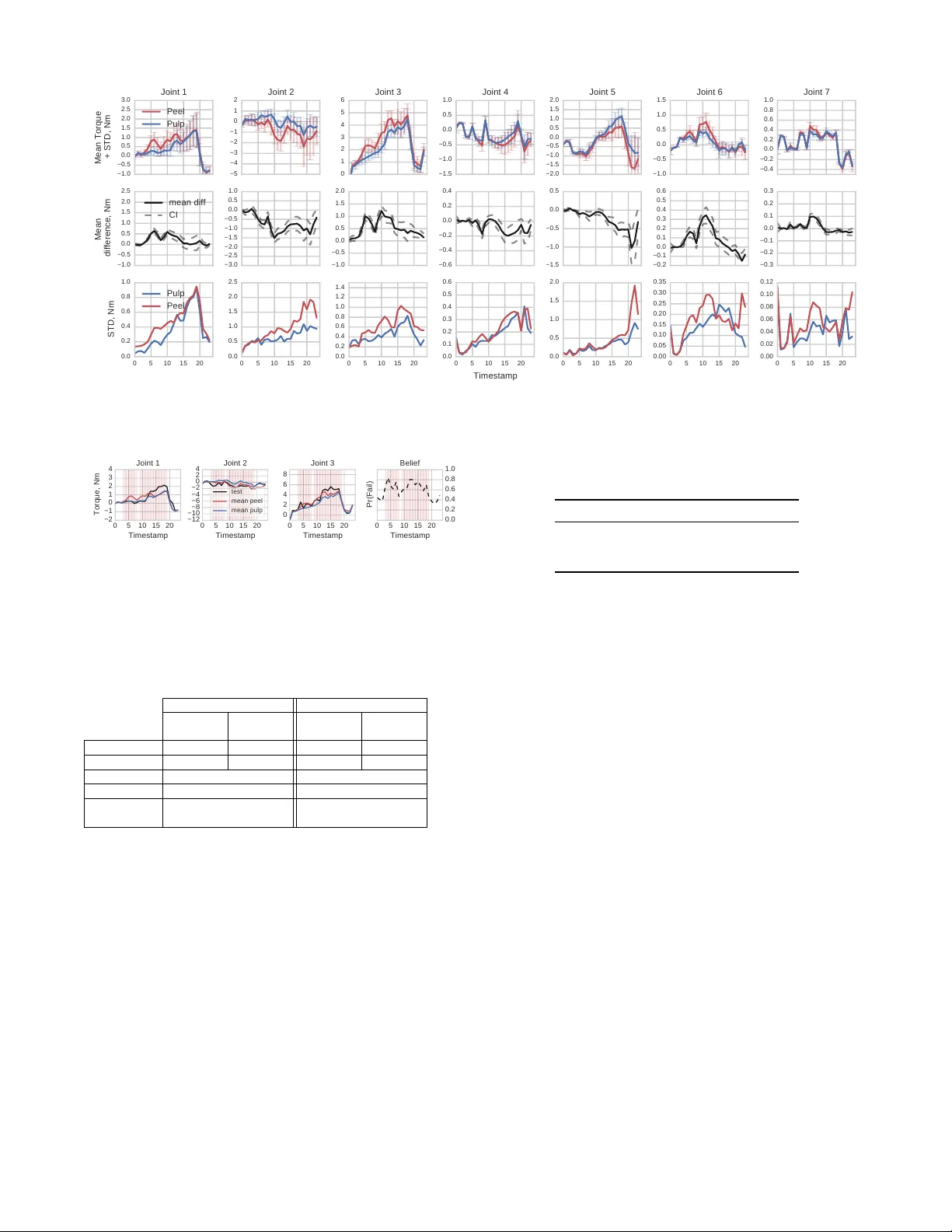
첫 번째 아이디어는 관절 토크 데이터를 이용한 매질 구분이다. 조직의 강성 차이(과육 µ₁, 껍질 µ₂)는 로봇 관절에 전달되는 토크에 미세한 변화를 일으킨다. 저자는 7‑DOF PR2 로봇 팔을 사용해 스쿠핑 동작을 수행하면서, 성공(과육을 손상 없이 추출)과 실패(껍질에 끼임) 각각에 대한 토크 시퀀스를 수집하였다. 각 시도는 24개의 시간 인덱스에 대해 7개의 관절 토크를 기록했으며, 이를 8차원 입력(시간 인덱스 포함)으로 변환하였다. 수집된 111개의 시도(성공 55, 실패 56)를 무작위로 섞어 90개를 학습·검증, 21개를 테스트에 사용하였다. 로지스틱 회귀 모델을 통해 매질(‘과육’ 또는 ‘껍질’)에 대한 사후 확률 Pr(m,t) 를 추정한다. 모델은 L2 정규화를 적용해 과적합을 방지했으며, 10‑fold 교차 검증을 통해 평균 정확도 약 78 %를 기록했다. 중요한 점은 모델이 확률값을 제공한다는 것으로, 확률이 0.5에 가까울수록 경계에 위치함을 의미한다.
두 번째 아이디어는 동적 움직임 원시(DMP)를 이용한 명시적 스쿠핑 궤적을 학습하고, 위에서 얻은 확률을 실시간 교정 신호로 활용하는 폐쇄‑루프 제어법이다. DMP는 인간이 kinesthetic demonstration을 통해 제공한 궤적을 기반으로 가속·속도·위치 관계를 파라미터화한다. 여기서 f(x) 는 비선형 강제항으로, 여러 개의 가우시안 기반 basis function을 가중합해 표현한다. 학습된 DMP는 ‘명시적’ 스쿠핑 궤적 yₜ 을 생성한다. 그러나 조직 형태와 강성의 변동으로 인해 이 궤적만으로는 경계에 정확히 머물기 어렵다. 따라서 저자는 교정 벡터 Δₜ = Kₜ·(Pr(m,t)−0.5) 를 정의하고, 이를 현재 궤적에 더해 보정된 궤적 y'ₜ = yₜ+Δₜ 를 실시간으로 계산한다. 여기서 Kₜ 는 시간‑의존적인 양의 정부호 행렬로, 현재 위치에 따라 교정 방향과 크기를 조절한다. 확률이 0.5보다 크면 ‘껍질’ 쪽으로, 작으면 ‘과육’ 쪽으로 교정한다. 이렇게 하면 로봇은 매 순간 매질 구분 확률을 기반으로 경계에 머무르는 방향으로 미세하게 궤적을 수정한다.
실험은 PR2 로봇 팔에 파링 나이프를 장착하고, 반으로 자른 그레이프프루트를 고정한 상태에서 수행되었다. 초기에는 DMP만을 사용해 10개의 무작위 세그먼트를 스쿠핑했으며, 성공률은 20 %(2/10)였다. 대부분은 나이프가 껍질에 끼어 움직임이 중단되었다. 이후 토크 기반 분류와 실시간 교정을 적용한 결과, 111개의 전체 시도 중 55번(≈72 %)이 성공했으며, 실패는 주로 토크 신호가 불명확하거나 급격한 강성 변동이 발생한 경우였다.
논문은 기존 연구와 차별화되는 점을 강조한다. 강체 물체 조작에 초점을 맞춘 힘 피드백 연구(문헌
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기