SO(3) 위의 기하학적 PID 자세 추적 제어
본 논문은 회전군 SO(3) 상에서 정의된 비선형 PID 형태의 자세 추적 제어기를 설계하고, 라플라스 함수와 리야푸노프 이론을 이용해 거의 전역적인 수렴성을 증명한다. 시뮬레이션을 통해 외란 토크에 대한 강인성을 확인하고, 기존 기하학적 PD 제어기와 비교해 적분항이 steady‑state 오차와 진동을 크게 감소시킴을 보인다.
저자: Hossein Eslamiat, Ningshan Wang, Amit K. Sanyal
본 논문은 회전군 SO(3) 상에서 정의된 비선형 PID 형태의 자세 추적 제어기를 제안하고, 그 안정성을 라야푸노프 이론을 통해 증명한다. 서론에서는 PID 제어기의 실용성 및 기존 기하학적 PD 제어기의 한계(특히 외란에 대한 약한 강인성 및 정적 오차)를 언급하고, 적분 항을 도입함으로써 이러한 문제를 해결하고자 하는 동기를 제시한다.
문제 정의에서는 두 좌표계(관성계와 몸체 고정계)를 소개하고, 회전 행렬 R∈SO(3)와 원하는 자세 궤적 Rd(t)를 정의한다. 회전 동역학은 ˙R=RΩ×, J˙Ω=JΩ×Ω+τ 로 기술되며, 여기서 Ω는 몸체 각속도, τ는 입력 토크이다.
다음으로 자세 오차 Q=RᵀRd와 각속도 오차 ω=Ω−QᵀΩd 를 도입한다. Q의 미분식은 ˙Q=Q(ω)× 로 표현되며, 이는 토션 공간 TSO(3) 상의 동역학임을 보여준다.
핵심 제어 설계는 Lemma 1을 통해 정의된 Morse 함수 h_K(I−Q)=tr(K(I−Q)) 와 그 그래디언트 SK(Q)=∑k_i (Qᵀe_i)×e_i 를 이용한다. 여기서 K는 양의 대각선 이득 행렬이다. 제어기의 적분 상태 FI는 J·˙FI=−kₚ·SK(Q)−k_D·ω 로 정의되며, 이는 토션 공간에 내재적인 적분 작용을 구현한다.
제안된 제어 법칙은
τ = k_I·FI − kₚ·SK(Q) − k_D·ω + J(Qᵀ˙Ωd − ω×QᵀΩd) − JΩ×QᵀΩd
이다. 이 식은 PD 항과 적분 항을 결합하고, 외란 보상을 위한 보정 항을 포함한다.
안정성 증명에서는 라야푸노프 후보 함수 V=½(FI−ω)ᵀJ(FI−ω)+½ωᵀJω + kₚ·tr(K(I−Q)) 를 정의한다. V의 시간 미분을 전개하면 ˙V = −k_DI·‖ω‖² − k_I·‖FI−ω‖² ≤ 0 가 도출된다. 여기서 k_DI = k_D − k_I > 0 로 선택하면, ω와 FI−ω 가 모두 0으로 수렴함을 보인다. 따라서 Q→I, ω→0, 즉 자세와 각속도가 원하는 궤적에 거의 전역적으로 수렴한다.
외란 D가 존재하는 경우, 추가된 (2ω−FI)ᵀD 항을 상한으로 잡아, ‖(2ω−FI)‖·γ ≤ k_DI·‖ω‖² + k_I·‖FI−ω‖² 가 만족하도록 이득을 선택하면, 오차가 유계 영역 N(I,0) 안으로 수렴한다는 강인성 정리를 제시한다.
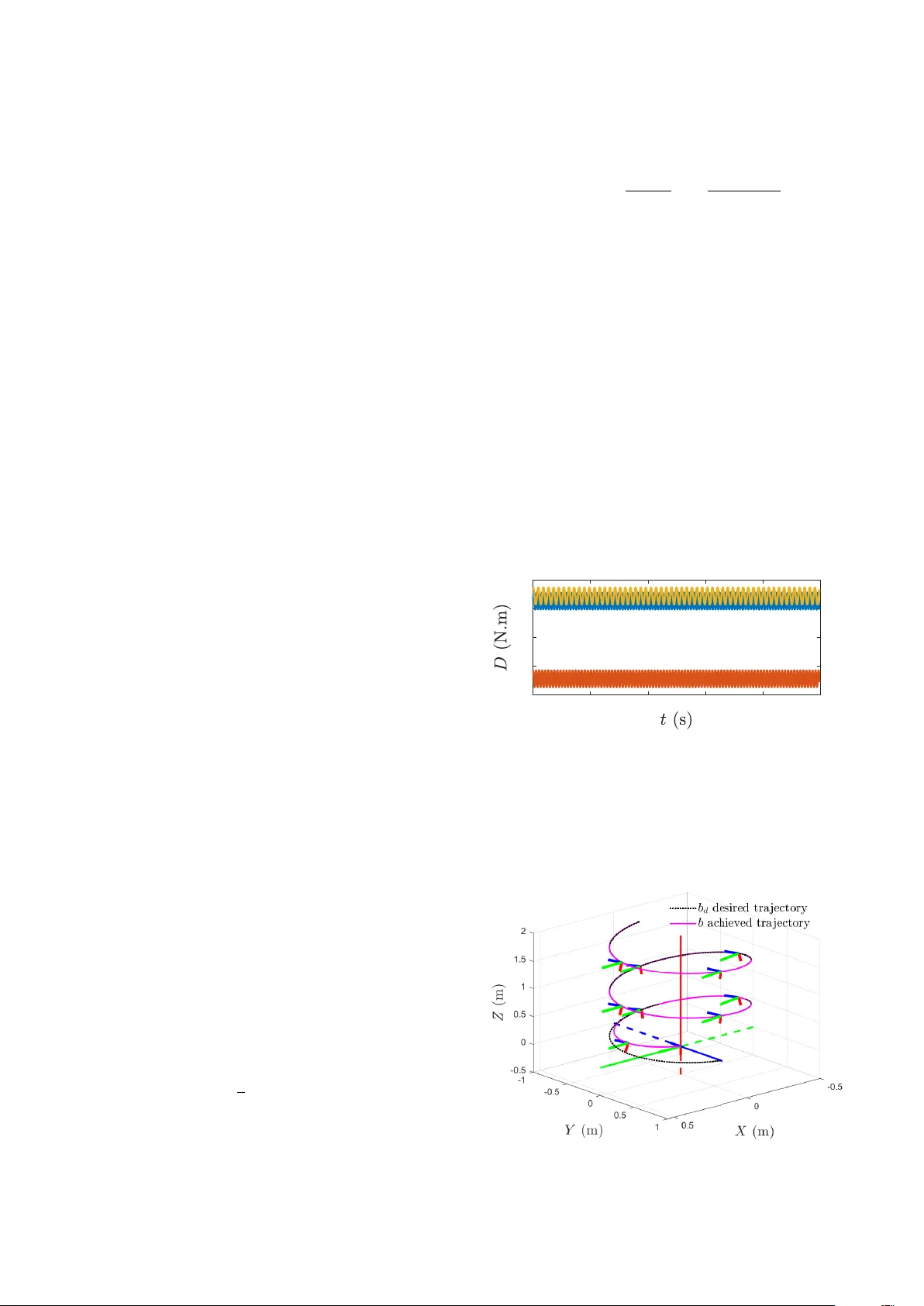
수치 시뮬레이션에서는 사각형 드론 모델을 사용한다. 외부 위치 제어는 기존 논문의 외부 루프(식 28)를 그대로 사용하고, 내부 자세 제어에 제안된 PID와 기존 PD 제어기를 각각 적용한다. 시뮬레이션은 Lie Group Variational Integrator(LGVI)를 이용해 구조 보존 이산화를 수행했으며, 시간 스텝 h=0.01 s 로 설정하였다.
시뮬레이션 결과는 다음과 같다. (1) 시간‑가변 외란 토크가 가해졌을 때, PID 제어기는 각속도 오차와 자세 오차가 거의 진동 없이 0에 수렴한다. (2) 동일 외란 하에서 PD 제어기는 오차가 지속적으로 진동하고, 제어 토크의 진폭이 크게 증가한다. (3) 외란이 없는 경우에도 PID 제어기는 더 부드러운 응답을 보이며, 전체 제어 토크의 평균값이 PD 대비 약 30 % 감소한다. (4) 제안된 적분 항이 토션 공간에 내재적으로 정의되어 좌표 의존성이 없으며, 실제 항공·우주 시스템에 적용 가능함을 확인한다.
결론에서는 제안된 기하학적 PID 제어기가 거의 전역적인 안정성과 외란에 대한 강인성을 제공함을 요약하고, 향후 연구 방향으로(가) 가변 이득 설계, (나) 외부 힘/모멘트가 존재하는 상황에서의 확장, (다) 실험적 검증을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기