장거리 수요 예측 불확실성을 견디는 강인 계층형 MPC 기반 자동차 열관리
초록
본 논문은 장시간 수요 예측 오차에 강인한 계층형 모델 예측 제어(H‑MPC)를 제안한다. 상위 스케줄링 MPC는 긴 예측 구간과 느린 업데이트로 느린 상태(예: 배터리 온도)를 최적화하고, 하위 파일럿 MPC는 짧은 구간과 빠른 업데이트로 정확한 단기 수요 프리뷰를 활용해 트래킹한다. 파일럿 레이어에서 예측된 제약 위반을 기반으로 스케줄링 레이어의 제약을 사전 축소(constraint tightening)함으로써 장기 예측 불확실성에 대비한다. 차량 열관리 시뮬레이션을 통해 제안 기법의 효과가 입증된다.
상세 분석
이 논문은 다중 시간 스케일을 갖는 동적 시스템, 특히 자동차와 항공기의 열관리와 같이 ‘느린’ 저장 상태와 ‘빠른’ 제어 입력이 동시에 존재하는 문제에 초점을 맞춘다. 기존의 단일 레이어 MPC는 긴 예측 호라이즌을 사용하면 계산량이 급증하고, 장기 수요 예측의 정확도가 낮아 제약 위반 위험이 커진다. 반면, 계층형 MPC는 두 개의 서로 다른 호라이즌과 업데이트 주기를 활용해 계산 효율성과 예측 정확도를 동시에 확보한다.
상위 스케줄링 레이어는 느린 샘플링 주기(T_s = ν·T)와 긴 호라이즌(H_s)을 사용해 느린 상태의 최적 궤적을 생성한다. 여기서는 장기 수요 프리뷰(ˆu_s)를 근사적으로만 이용한다. 하위 파일럿 레이어는 짧은 호라이즌(H_p)과 빠른 샘플링(T)으로, V2V/V2I 통신을 통해 얻은 고정밀 단기 수요 프리뷰(ˆu)를 활용한다. 파일럿 MPC는 원래의 비용함수에 느린 상태 트래킹 항을 추가해 스케줄링 레이어가 제시한 목표를 따르면서 빠른 상태를 제어한다.
핵심 기여는 파일럿 레이어에서 얻은 ‘예측된 제약 위반 정보’를 스케줄링 레이어에 피드백하여 제약을 사전 축소(constraint tightening)하는 것이다. 구체적으로, 파일럿 레이어에서 현재 시점 k에 대한 미래 상태 x(k+j+1|k)를 예측하고, 느린 상태가 허용 범위를 초과할 경우 그 초과량을 ¯q_x(k+j+1|k)로 계산한다. 이를 기존 제약 q_x에서 차감해 X_robust = X ∩ X_1 ∩ … ∩ X_{H_p-1}를 만든다. 이렇게 얻은 강인 제약 집합은 다음 스케줄링 단계에서 사용되어, 장기 예측 오차가 발생하더라도 사전에 여유를 확보한다.
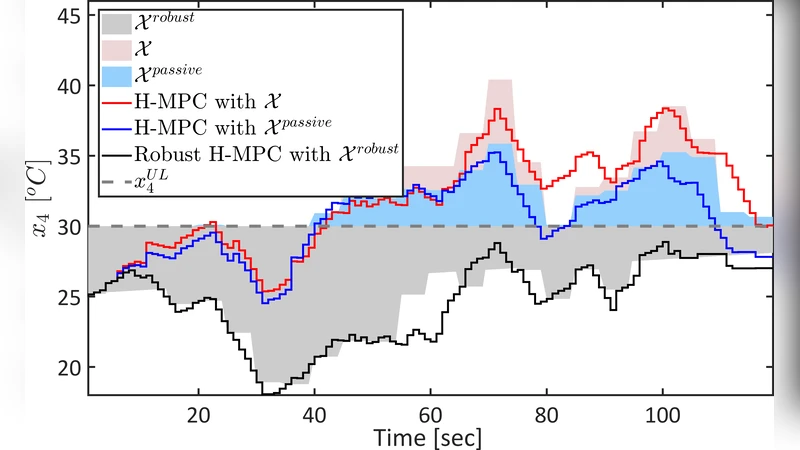
논문은 또한 ‘수동형’ 제약 축소(실제 위반이 감지된 시점에만 제약을 축소)와 비교해, 사전 예측 기반 축소가 느린 동적 특성에 더 효과적임을 강조한다. 수동형 방식은 위반 발생 후에야 조정이 이루어지므로, 느린 상태가 이미 큰 편차를 보인 뒤에야 보정이 가능해 효율이 떨어진다.
시뮬레이션은 간소화된 차량 열관리 모델을 사용했으며, 제안된 강인 H‑MPC가 기존 H‑MPC 대비 제약 위반을 크게 감소시키고, 전체 에너지 효율을 향상시켰다. 특히, V2V/V2I 기반 단기 프리뷰가 정확할수록 파일럿 레이어의 예측 정확도가 높아져 제약 축소 효과가 극대화된다.
요약하면, 이 연구는 장기 수요 불확실성을 다루기 위해 계층형 MPC 구조에 단기 고정밀 프리뷰와 예측 기반 제약 축소를 결합한 새로운 강인 제어 프레임워크를 제시하고, 자동차 열관리 분야에서 실질적인 성능 향상을 입증하였다.
댓글 및 학술 토론
Loading comments...
의견 남기기