폐루프 성능 기반 커널 모델 선택을 위한 베이지안 최적화
본 논문은 커널 기반 비모수 모델의 커널과 하이퍼파라미터를 예측 오차가 아니라 실제 제어 루프에서의 폐루프 성능을 직접 최적화하는 프레임워크를 제안한다. 베이지안 최적화(BO)를 이용해 실제 시스템에 적용·평가된 비용을 반복적으로 이용함으로써, 제한된 실험 횟수 내에서 제어 성능을 극대화하는 커널·하이퍼파라미터 조합을 찾아낸다. 시뮬레이션과 3자유도 로봇 팔 실험을 통해 기존의 오픈루프 기반 모델 선택 방법보다 우수한 제어 결과를 보인다.
저자: Thomas Beckers, Somil Bansal, Claire J. Tomlin
본 논문은 비선형 시스템 제어에 널리 사용되는 커널 기반 비모수 모델(예: Support Vector Machine, Gaussian Process)의 커널 함수와 하이퍼파라미터 선택 문제를 새로운 관점에서 접근한다. 기존 연구에서는 주로 모델의 예측 정확도를 높이기 위해 교차 검증, 로그 가능도 최대화 등 데이터 기반 손실 함수를 최소화하는 방법을 사용했다. 그러나 이러한 오픈루프 기반 모델 선택은 모델이 실제 제어 루프에 투입될 때 발생하는 피드백 효과와 제어 목표(트래킹 정확도, 에너지 효율 등)를 반영하지 못한다. 결과적으로, 예측 오차가 작더라도 제어 성능이 저하되는 경우가 발생한다.
이를 해결하기 위해 저자들은 “폐루프 모델 선택”이라는 프레임워크를 제안한다. 핵심 아이디어는 커널·하이퍼파라미터를 직접 폐루프 비용 함수 C(y₀:k, u₀:k)=∑_{k=0}^{n-1} c(y_k, u_k) 를 최소화하도록 최적화하는 것이다. 여기서 c는 사용자가 정의한 제어 목적(예: 트래킹 오차, 전력 소비 등)을 나타낸다. 시스템은 이산 시간 비선형 형태 x_{k+1}=f(x_k, u_k), y_k=g(x_k, u_k) 로 모델링되며, 제어법칙 u_k = h(y_k - r_k, m_k) 에서 m_k는 커널 기반 모델 M이 제공하는 예측값이다.
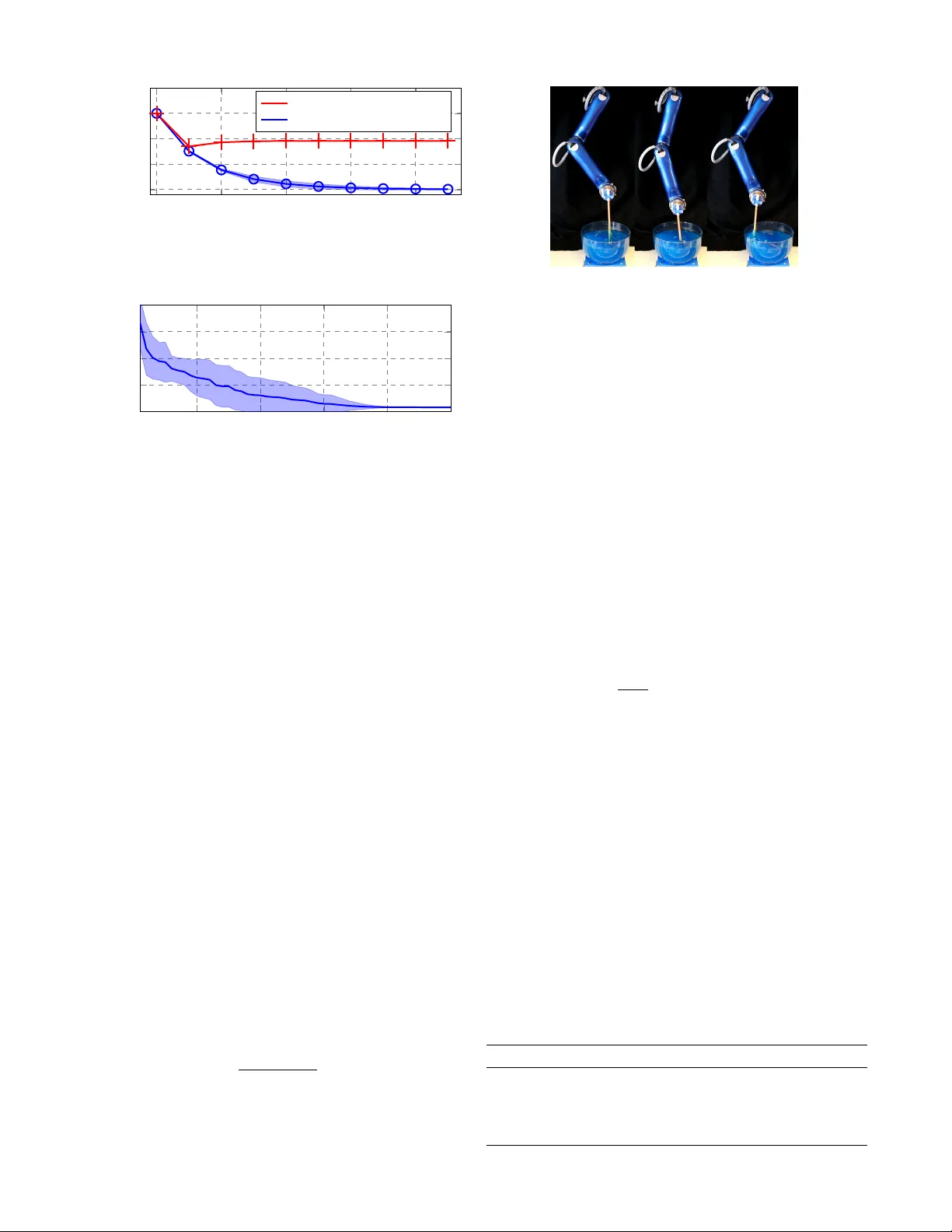
폐루프 최적화는 다음 3단계 순환으로 이루어진다.
1) **초기화**: 후보 커널 집합 K={K₁,…,K_{n_K}}와 각 커널에 대응하는 하이퍼파라미터 집합 Φ={Φ₁,…,Φ_{n_K}}를 정의한다. 초기 커널·하이퍼파라미터는 기존 모델 선택 방법(예: 최대 가능도)으로 설정한다.
2) **태스크 평가**: 현재 선택된 커널 K_j와 하이퍼파라미터 φ_j를 사용해 모델 M을 구축하고, 제어법칙 h에 적용한다. 실제 시스템에 제어를 수행하고, 입력·출력 시퀀스 (u₀:k, y₀:k)를 기록한 뒤 비용 C를 계산한다.
3) **모델 최적화**: 베이지안 최적화(BO)를 이용해 비용 C를 최소화하는 새로운 (K_j, φ_j)를 탐색한다. BO는 이전 실험에서 얻은 (커널·하이퍼파라미터, 비용) 쌍을 기반으로 가우시안 프로세스 서프라이즈 모델을 업데이트하고, 기대 개선(Expected Improvement) 혹은 EI‑plus와 같은 획득 함수를 통해 다음 실험에 사용할 후보를 제안한다.
이 과정은 사전에 정의된 실험 횟수 제한 혹은 만족스러운 성능 기준에 도달할 때까지 반복된다. 중요한 점은 BO가 연속형 하이퍼파라미터와 이산형 커널 선택을 동시에 다루어야 한다는 점이다. 이를 위해 저자들은 정수형 입력을 지원하도록 변형된 BO 알고리즘(
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기