슬라이딩 모드 기반 리드‑래그 셰이퍼를 이용한 인터랙티브 힘 추정
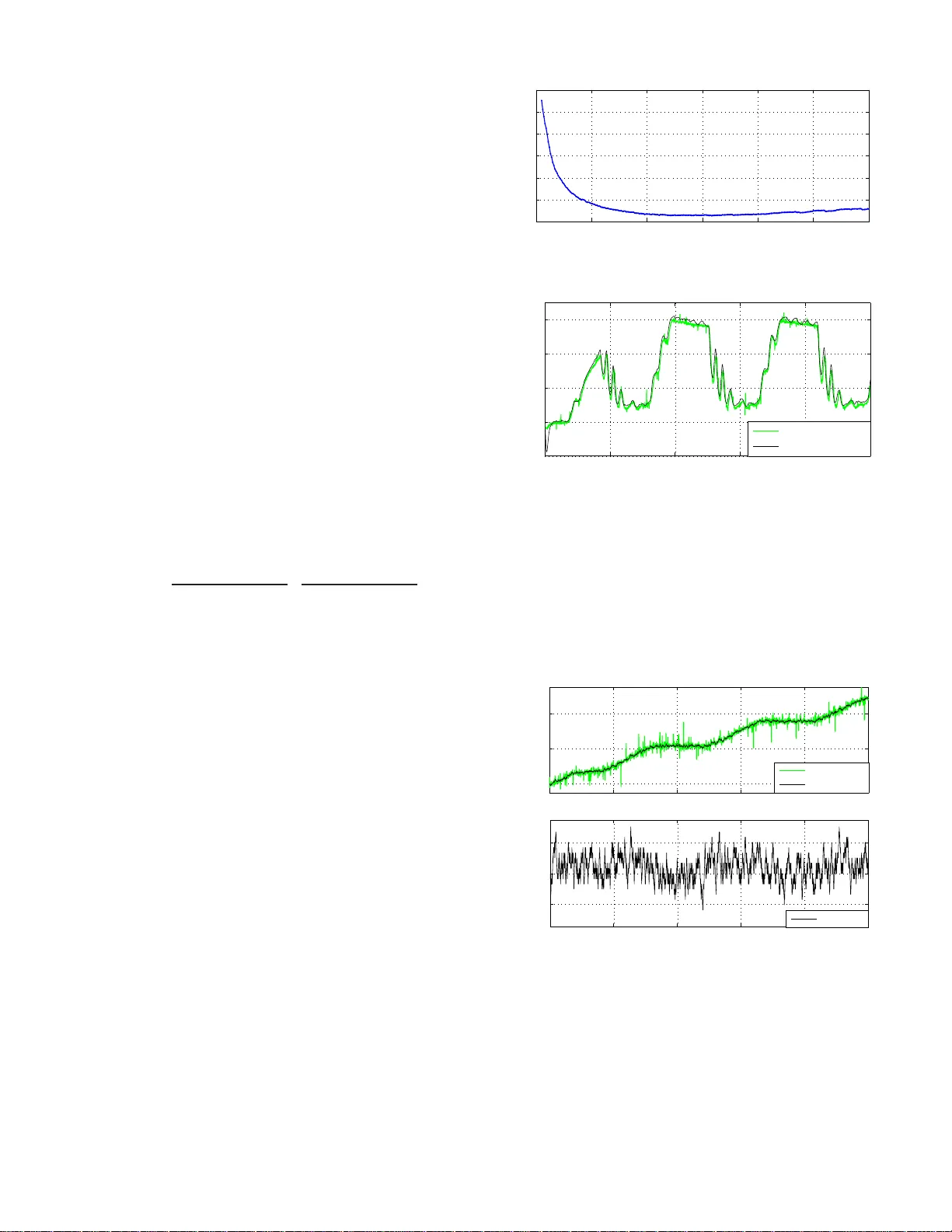
본 논문은 2차 슬라이딩 모드의 등가 출력 주입(equivalent output injection)을 활용해 시스템‑환경 인터페이스에서 발생하는 상호작용 힘을 실시간으로 추정한다. 추정된 무형량에 시스템‑환경 동특성을 반영한 리드‑래그 전송함수를 적용함으로써, 실제 측정과 거의 일치하는 정확한 힘 추정이 가능함을 수압 실린더 실험을 통해 입증한다.
저자: Michael Ruderman
**1. 서론 및 배경**
인터랙티브 힘은 시스템과 환경 사이의 접촉에서 발생하며, 직접 측정이 어려운 경우가 많다. 나노 스케일 터치 디바이스, 의료 메카트로닉스, 인간형 로봇, 대형 수압 시스템 등 다양한 분야에서 이러한 힘을 정확히 파악하지 못하면 제어 성능 저하나 불안정성을 초래한다. 기존 연구는 환경 임피던스를 명시적으로 모델링하거나, 고차 필터링, 관측기 설계 등을 통해 힘을 추정했지만, 파라미터 식별의 복잡성이나 모델링 오차가 큰 한계로 작용한다.
**2. 시스템 모델링**
논문은 2포트 네트워크 모델을 사용해 서보 메카니즘과 환경을 각각 포트 1, 포트 2로 구분한다. 전압‑전류(또는 속도‑힘) 변수 (V₁,F₁)와 (V₂,F₂) 사이의 전송 행렬 S를 정의하고, 역행렬 S̅=S⁻¹을 통해 F₁= S̅₁₂·F₂ + S̅₁₁·V₁ 형태로 표현한다. 여기서 S̅₁₂는 환경과의 교차 결합을 나타내며, 일반적으로 알려지지 않는다. 따라서 S̅₁₂를 추정하는 것이 인터랙티브 힘을 복원하는 핵심 과제가 된다.
**3. 리드‑래그 셰이퍼 모델**
환경의 동특성을 일반적인 n차 리드‑래그 전송함수
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기