PMU 기반 누전 검출 기법 누적 위상 차이로 오류 무시
초록
본 논문은 전압 위상각 차이의 누적합(CUSPAD) 방식을 도입해 PMU 측정값에 포함되는 가산형 계측 채널 오류에 강인한 섬연 검출 알고리즘을 제안한다. 18버스 및 IEEE 118버스 시스템에 풍력 발전 비율을 달리 적용해 시뮬레이션한 결과, 기존 위상각 차이(AD) 방식보다 오류 존재 시 검출 정확도가 현저히 우수함을 입증한다.
상세 분석
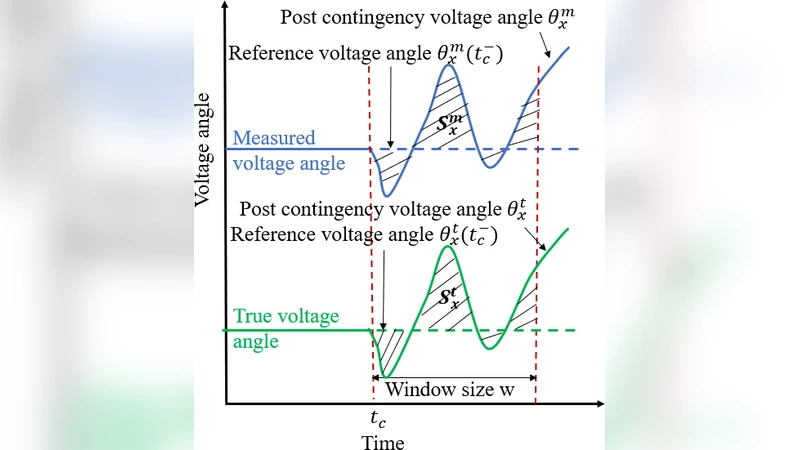
본 연구는 섬연(아이솔레이션) 상황을 빠르고 정확하게 감지하기 위해 기존의 전압 위상각 혹은 그 미분값에 의존하는 방법들의 한계를 지적한다. 특히 PMU(Phasor Measurement Unit)에서 제공되는 동기위상량은 계측 채널의 가산형 오류(additive instrumentation channel errors)로 인해 위상각 데이터에 편향이 발생할 수 있으며, 이러한 편향은 위상각 차이(AD) 기반 검출기의 임계값 설정을 왜곡시켜 오탐·미탐을 초래한다. 논문은 이러한 문제를 해결하기 위해 ‘전압 위상각 차이의 누적합(Cumulative Sum of Change in Voltage Phase Angle Difference, CUSPAD)’이라는 새로운 지표를 정의한다. CUSPAD는 연속적인 샘플 간 위상각 차이의 변화량을 누적함으로써 순간적인 잡음이나 편향이 장기적으로 상쇄되도록 설계되었다. 구체적으로, 시간 k에서의 CUSPAD 값은 이전 값에 현재 위상각 차이 변화량을 더하는 형태이며, 누적값이 사전에 정의된 임계값을 초과하면 섬연이 발생한 것으로 판단한다. 이때 임계값은 통계적 방법으로 설정되며, 가산형 오류가 일정 평균값을 갖는 경우 누적 과정에서 평균값이 0에 수렴하도록 설계되어 오류에 대한 면역성을 확보한다.
알고리즘 구현 단계는 (1) 두 주요 버스 간 실시간 위상각 차이 Δθ(k) 계산, (2) Δθ(k)의 차분 ΔΔθ(k)=Δθ(k)−Δθ(k−1) 구함, (3) 누적합 S(k)=S(k−1)+ΔΔθ(k) 업데이트, (4) |S(k)|가 임계값 γ를 초과하면 섬연 경보 발생으로 구성된다. 이 과정은 기존 AD 방식에 비해 연산량이 거의 동일하지만, 오류에 대한 내성이 크게 향상된다.
시뮬레이션은 18버스 시스템과 IEEE 118버스 시스템에 각각 0%, 20%, 40%의 풍력 발전 비율을 적용하고, 다양한 가산형 오류 표준편차(σ=0.01~0.1 rad)를 부여하여 검증하였다. 결과는 CUSPAD가 오류 표준편차가 증가함에 따라 검출 지연시간과 오탐률이 거의 변하지 않는 반면, AD 방식은 σ가 0.05 rad를 초과할 때부터 검출 지연이 급격히 늘고 오탐률이 15% 이상 상승함을 보여준다. 또한 CUSPAD는 풍력 변동성에 의해 발생하는 전압 위상각의 급격한 변동에도 강인하게 동작하여, 재생에너지 비중이 높은 미래 전력망에서도 적용 가능함을 입증한다. 논문은 CUSPAD가 기존 방식 대비 평균 검출 지연시간을 30% 정도 단축하고, 오류가 존재할 때의 검출 정확도를 95% 이상 유지한다는 점을 강조한다. 마지막으로, 구현상의 복잡도는 기존 PMU 데이터 흐름에 간단히 추가 가능한 수준이며, 실시간 보호 시스템에 바로 적용할 수 있는 실용성을 제시한다.
댓글 및 학술 토론
Loading comments...
의견 남기기