재구성 가능한 다중 UAV 편대: 각도 인코딩 PSO 기반 경로 계획
본 논문은 시각 기반 인프라 검사를 위해 다중 UAV 편대를 구성하고, 각도 인코딩 입자군집 최적화(θ‑PSO)를 이용해 편대 중심의 최적 경로를 생성한다. 중간 웨이포인트와 재구성 가능한 편대 형태(정렬, 회전, 수축)를 도입해 장애물 회피와 통신·시야 제약을 만족하도록 설계하였다. 라이트 레일 교량 실험을 통해 알고리즘의 안전성 및 효율성을 검증하였다.
저자: V.T. Hoang, M.D. Phung, T.H. Dinh
본 논문은 인프라 시각 검사를 위해 다중 무인항공기(UAV) 편대를 구성하고, 이를 안전하고 효율적으로 운용하기 위한 경로 계획 및 편대 재구성 알고리즘을 제안한다. 연구는 크게 네 부분으로 구성된다.
첫 번째는 편대 중심의 최적 경로를 생성하기 위한 θ‑PSO(Angle‑Encoded Particle Swarm Optimization)이다. 기존 PSO는 입자의 위치와 속도를 직접 업데이트하는 반면, θ‑PSO는 입자의 위치를 각도 θ로 인코딩하고, 각도 변화량 Δθ를 이용해 입자를 이동시킨다. 이를 통해 탐색 공간을 각도 구간(−π/2, π/2)으로 제한하고, 삼각함수를 이용해 실제 3‑D 좌표로 변환한다. 입자 업데이트 식은 관성 가중치 w, 개인·전역 최적 위치 λ_i, λ_g, 그리고 학습 계수 c₁, c₂를 포함한다.
두 번째는 비용 함수 설계이다. 목적 함수 J_F는 세 개의 서브 비용 J₁(경로 길이), J₂(장애물 회피), J₃(고도 제한)를 가중치 β₁, β₂, β₃와 함께 선형 결합한다. J₁은 경로를 L개의 직선 구간으로 나누어 각 구간의 유클리드 거리를 합산한다. J₂는 각 구간 중점과 K개의 장애물 사이 거리를 계산해, 안전 반경 r_S보다 작을 경우 (1−d/r_S) 형태의 페널티를 부여한다. J₃는 각 구간의 평균 고도 z_M이 사전 정의된 최소·최대 고도(z_min, z_max)를 벗어날 경우 큰 페널티를 부과한다.
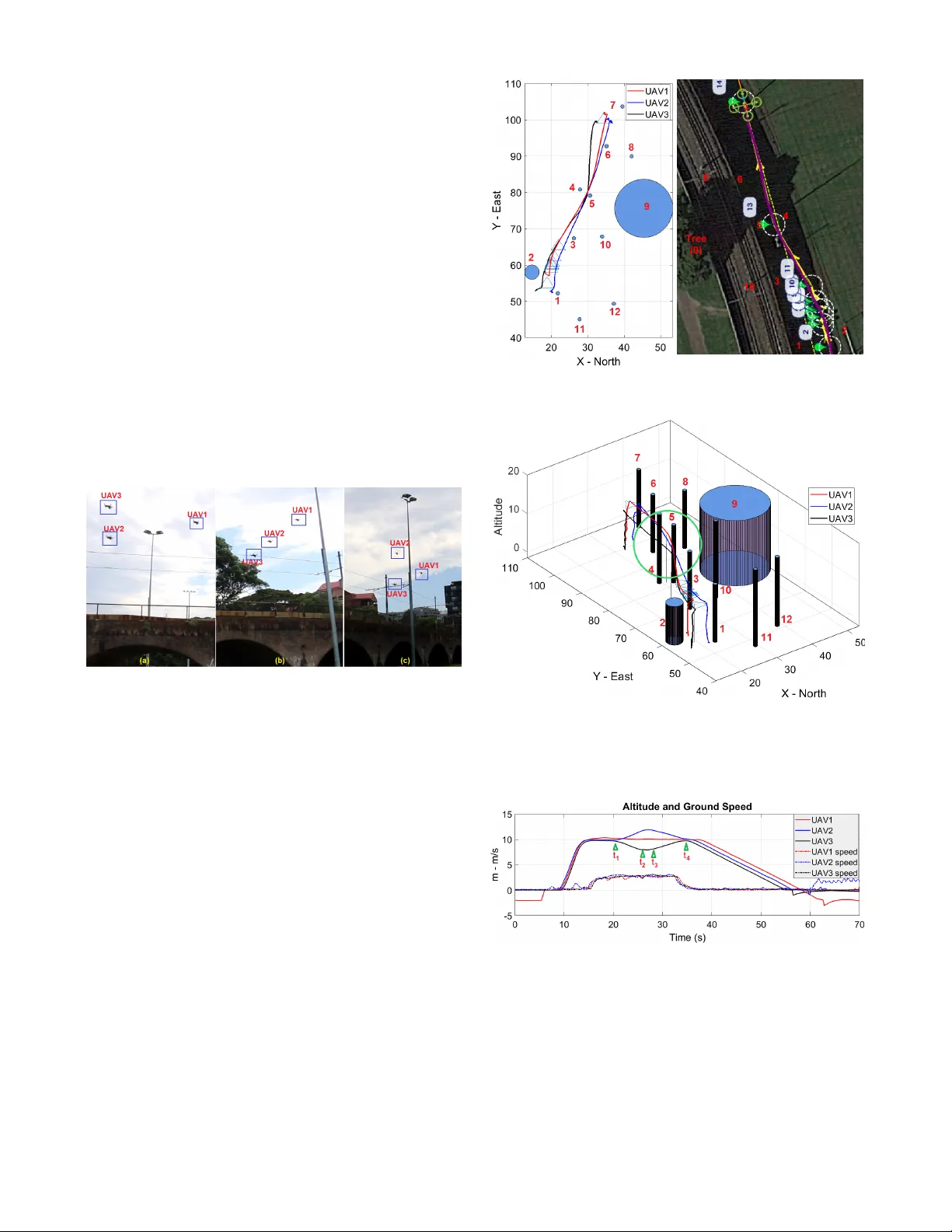
세 번째는 편대 재구성을 위한 중간 웨이포인트(IWP)와 형태 전환 메커니즘이다. IWP는 인접 장애물 사이의 최소 거리와 UAV의 안전 반경을 고려해 두 장애물의 교차점 사이 선분의 중점으로 정의한다. IWP를 경유함으로써 편대는 좁은 통로나 복잡한 지형을 통과할 때 형태를 변환한다. 변환 가능한 형태는 (1) 정렬(Alignment): UAV가 일렬로 배열, (2) 회전(Rotation): 편대가 강체처럼 회전, (3) 수축(Shrinkage): 편대가 중심으로 수렴해 간격 최소화. 각 변환은 변환 단계(t₁→t₂)와 재구성 단계(t₃→t₄)로 구분되며, 변환 전·후 UAV와 편대 중심 사이 거리 차 Δd와 속도 차 ΔV를 계산해 비행 시간과 속도 프로파일을 보정한다.
네 번째는 개별 UAV 궤적 생성이다. 최적화된 편대 중심 경로 P*_F와 각 IWP에서 선택된 형태에 따라, 각 UAV의 상대 위치 ΔP를 계산한다. 관성 좌표계와 편대 좌표계 사이 변환을 위해 회전 행렬 R_IF를 사용하고, 최종 궤적은 P*_n = P*_F + ΔP_n 로 정의된다. 속도 프로파일 V_n은 변환 단계에서 계산된 ΔV를 적용한다. 최종 명령 집합 T_n =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기