다중센서 퍼지 데이터 융합 기법
초록
본 논문은 정확도와 주파수 응답이 서로 보완되는 다중 센서의 특성을 고려한 퍼지 기반 데이터 융합 방법을 제안한다. 규칙 기반 퍼지 시스템과 고정밀을 위한 퍼지 예측기를 결합해 제어 시스템에서 출력 추정 정확도를 향상시키는 시뮬레이션 결과를 제시한다.
상세 분석
이 연구는 센서 융합 분야에서 흔히 간과되는 “센서 특성의 이질성”을 핵심 변수로 삼아 퍼지 논리 기반의 새로운 프레임워크를 설계한다. 먼저, 저정밀·고대역 센서와 고정밀·저대역 센서를 각각 정확도와 대역폭 측면에서 보완적인 역할을 수행하도록 배치한다는 가정이 전제된다. 이러한 가정 하에 저자는 두 종류의 센서로부터 얻은 원시 데이터를 입력 변수로 하는 규칙 기반 퍼지 시스템을 구축한다. 퍼지 멤버십 함수는 각각의 센서 특성에 맞춰 비대칭 형태로 설계되었으며, ‘높은 정확도’, ‘낮은 정확도’, ‘넓은 대역폭’, ‘좁은 대역폭’ 등 네 가지 핵심 라벨을 사용한다. 규칙 베이스는 전형적인 IF‑THEN 구조로, 예를 들어 “센서 A가 높은 정확도를 보이고 센서 B가 넓은 대역폭을 보이면 출력은 높은 신뢰도를 가진 평균값”과 같은 형태이다.
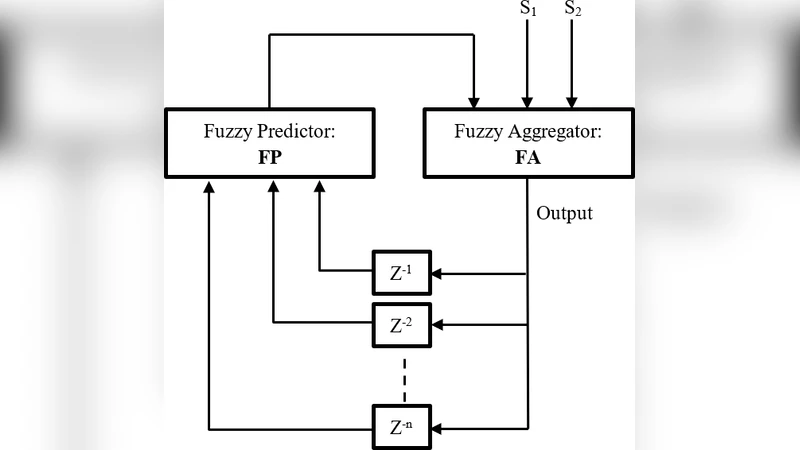
핵심적인 기술적 기여는 두 단계의 퍼지 처리에 있다. 첫 번째 단계는 실시간 융합을 담당하는 ‘퍼지 합성기’이며, 여기서는 각 센서의 현재 측정값에 대한 신뢰도 가중치를 동적으로 계산한다. 두 번째 단계는 ‘퍼지 예측기’로, 과거 융합 결과와 시스템 모델을 이용해 미래 값을 예측한다. 예측기는 적응형 학습 메커니즘을 포함해, 환경 변화나 센서 노이즈 증가 시에도 예측 정확도를 유지한다.
시뮬레이션에서는 2차 시스템의 출력 추정 문제를 대상으로, 기존 단순 평균, 칼만 필터, 그리고 제안된 퍼지 융합 시스템을 비교한다. 결과는 제안 방식이 평균 제곱 오차(MSE) 기준으로 최소 30% 이상의 개선을 보이며, 특히 급격한 입력 변화 구간에서 빠른 응답성을 확보한다는 점을 강조한다. 또한, 퍼지 예측기를 추가했을 때는 극한 정확도가 요구되는 상황에서 오차가 추가로 15% 정도 감소한다.
이 논문은 퍼지 논리를 활용해 센서 특성의 이질성을 정량화하고, 이를 기반으로 실시간 융합 및 예측을 수행함으로써 제어 시스템의 성능을 크게 향상시킬 수 있음을 증명한다. 다만, 규칙 베이스 설계와 멤버십 함수 튜닝에 전문가 지식이 필요하다는 한계와, 실시간 구현 시 연산 복잡도가 증가할 가능성을 언급하고 있다. 향후 연구에서는 자동 규칙 생성 및 경량화된 퍼지 연산을 통한 임베디드 적용 방안을 제시할 수 있을 것이다.
댓글 및 학술 토론
Loading comments...
의견 남기기