재난 구호와 원격 지역을 위한 드론 기반 통신 네트워크 최적화
초록
**
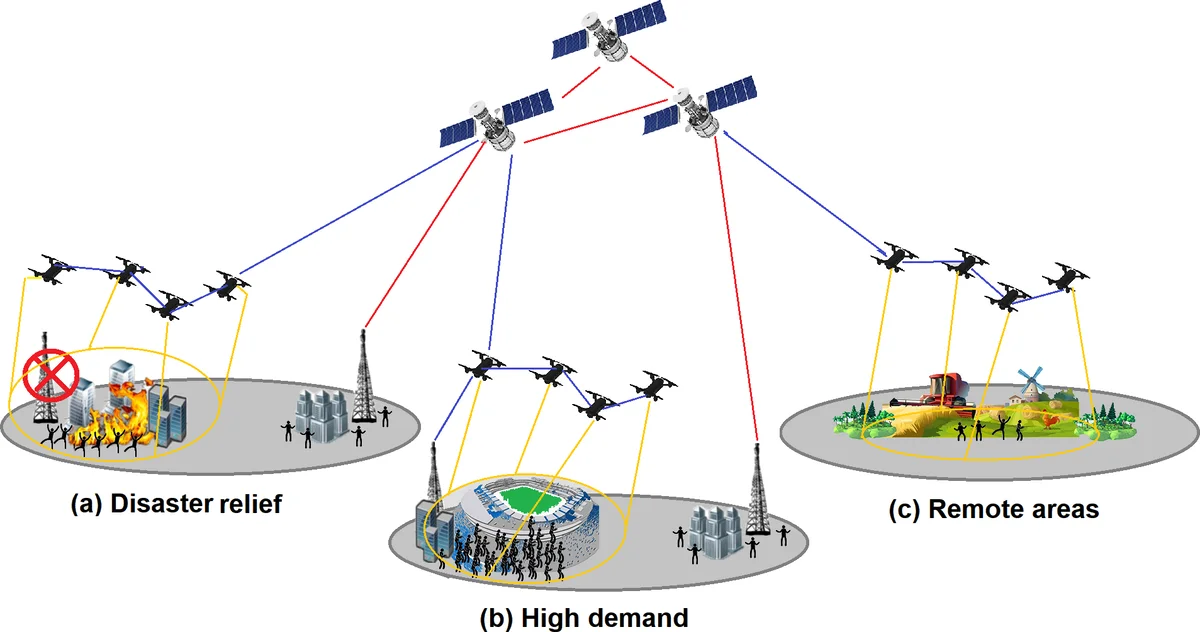
본 논문은 지상 사용자들의 트래픽 수요를 최소한의 UAV(드론) 수로 만족시키기 위해, 접근·백홀 링크를 모두 고려한 3단계 배치 및 에너지 인식 라우팅 프레임워크를 제안한다. 가중치 k‑means 군집화 → UAV 위치 최적화(병합·결정적 어닐링) → MILP 기반 에너지‑효율 라우팅 순으로 설계하고, 실험을 통해 지원되지 않는 트래픽을 거의 0에 가깝게 낮추면서 전력 소비와 지원 트래픽 사이의 균형을 확인한다.
**
상세 분석
**
이 연구는 UAV‑assisted 통신 시스템을 “접근(air‑to‑ground, A2G)·백홀(air‑to‑air, A2A)” 양쪽 모두를 포괄하는 엔드‑투‑엔드 관점에서 설계한다는 점이 차별적이다. 먼저 지상 사용자(GU)들의 위치와 트래픽 요구량을 기반으로 가중치 k‑means 군집화를 수행한다. 여기서 가중치는 각 노드의 전체 트래픽 수요이며, 초기 중심은 밀도 기반 박스 초기화(density‑based‑box) 방식을 적용해 군집의 균형을 맞춘다. 군집 수 k는 트래픽 매트릭스 D에 의해 동적으로 결정되므로, 트래픽이 집중된 지역에 더 많은 UAV가 할당될 수 있다.
두 번째 단계에서는 각 군집의 가중 중심에 UAV를 배치하고, “병합 알고리즘”을 통해 UAV 수를 최소화한다. 병합 기준은 각 UAV가 담당하는 총 트래픽이 사전 정의된 용량 C_max 이하가 될 때까지 인접 UAV를 하나로 합치는 방식이며, 이 과정에서 네트워크 연결성을 유지하기 위해 그래프 이론 기반 연결 검사(예: 최소 신장 트리)와 거리 제한을 동시에 고려한다. 연결성이 부족한 경우에는 결정적 어닐링(Deterministic Annealing, DA) 기법을 적용해 추가 UAV를 배치한다. DA는 온도 매개변수를 서서히 낮추면서 클러스터링 비용 함수를 최소화하므로, 전역 최적에 가까운 UAV 위치를 찾을 수 있다.
세 번째 단계는 에너지‑인식 라우팅이다. 여기서는 UAV 간 A2A 백홀 링크와 UAV‑GU A2G 링크를 포함한 전체 네트워크를 혼합 정수 선형 계획(MILP)으로 모델링한다. 목적 함수는 “지원 트래픽 최대화”와 “전체 전력 소비 최소화”를 동시에 달성하도록 가중치를 부여한 다목적 최적화이며, 변수는 각 링크의 활성화 여부와 전송 파워, 라우팅 경로 등을 포함한다. 제약 조건에는 UAV의 비행 시간 제한, 링크 용량, 연결성 유지, 그리고 각 UAV가 허용하는 최대 전력 한계가 포함된다. MILP 해법을 통해 얻어진 라우팅은 트래픽 부하가 높은 구간에서는 다중 홉을 활용해 전력 효율을 높이고, 저부하 구간에서는 직통 전송을 선택해 지연을 최소화한다.
실험 결과는 40개의 GU가 3개의 공간적 클러스터에 분포된 시나리오를 사용한다. UAV가 배치되지 않은 경우 OD(Origin‑Destination) 쌍이 증가함에 따라 지원되지 않은 트래픽 비율이 급격히 상승한다. 반면 제안된 UAV 배치와 에너지‑인식 라우팅을 적용하면 지원되지 않은 트래픽 비율이 거의 0에 가깝게 유지된다. 또한 에너지‑인식 라우팅을 적용했을 때 전력 소비는 감소하지만, 극단적으로 전력 절감만을 목표로 하면 지원 트래픽 비율이 떨어지는 트레이드오프가 존재함을 확인한다. 이는 실제 재난 구호 상황에서 “전력 보존 vs. 서비스 연속성” 사이의 정책 선택이 필요함을 시사한다.
본 논문의 주요 기여는 (1) 트래픽 기반 가중치 군집화를 통한 UAV 수 최소화, (2) 병합 및 결정적 어닐링을 결합한 연결성 보장 UAV 배치 알고리즘, (3) MILP 기반 에너지‑인식 라우팅 모델 제시이며, 특히 백홀 다중 홉을 명시적으로 고려한 점이 기존 연구와 차별화된다. 향후 연구에서는 시간‑가변 지상 네트워크 토폴로지와 UAV의 이동성(동적 재배치) 및 배터리 교체/충전 스케줄링을 포함한 종합적인 운영 전략을 탐색할 예정이다.
**
댓글 및 학술 토론
Loading comments...
의견 남기기