ASV 경로계획 속도 혁신: Voronoi 기반 워밍 스타트 최적화
본 논문은 자율수상체(ASV) 경로계획 파이프라인의 실행 시간을 크게 단축시키는 두 가지 핵심 개선점을 제시한다. 첫째, 균일 격자 대신 장애물 경계에 생성된 Voronoi 다이어그램을 이용해 A* 탐색 공간을 희소화한다. 둘째, Bhattacharya‑Gavrilova(2008)에서 제안된 코너 절단 및 웜‑포인트 감소 기법을 적용하고, 비용‑전파 단계에서 Runge‑Kutta4 대신 개선된 Euler 방법을 사용한다. 실험 결과, 단계 1·…
저자: Glenn Bitar, Anastasios M. Lekkas, Morten Breivik
본 논문은 자율수상체(ASV)의 실시간 경로계획을 목표로, 기존의 파이프라인인 “Uniform grid → A* → warm‑started optimal control problem(OCP)”에 두 가지 주요 개선을 적용하였다. 첫 번째 개선은 지도 이산화 단계에서 균일 격자 대신 Voronoi 다이어그램을 사용한 것이다. Voronoi 다이어그램은 장애물 경계에 생성점을 배치하고, 이들 사이의 셀 경계를 그래프의 노드와 에지로 활용한다. 생성점 간 거리 Δd를 동일하게 유지하면서도 노드 수가 수십 배 감소해 A* 탐색의 연산량이 크게 줄어든다(예: 22 929 → 833 노드). Voronoi 경계는 장애물에서 일정 거리 떨어져 있기 때문에 원시 경로는 길어질 수 있지만, 이는 두 번째 개선인 경로 정제 단계에서 보완한다.
두 번째 개선은 Bhattacharya와 Gavrilova(2008)에서 제안된 코너 절단 및 웜‑포인트 감소 알고리즘을 적용한 것이다. 기존 방법은 사용자 정의 알고리즘으로 경로를 원형 호로 연결하고, Runge‑Kutta 4(RK4) 통합을 통해 비용‑전파를 수행했다. 새 방법은 (1) 두 인접 에지 사이에 중간 점을 삽입하고 충돌 검사를 반복해 불필요한 굴곡을 제거하는 코너 절단, (2) 기존 웜‑포인트 감소 절차를 동일 논문에서 제시한 효율적인 절차로 교체, (3) 비용‑전파를 개선된 Euler 방법으로 대체한다. Euler 방식은 보간이 필요 없으며, 계산량이 현저히 적어 단계 2의 실행 시간이 2.2 s에서 0.1 s로 감소하였다.
전체 파이프라인은 다음과 같이 구성된다.
1️⃣ **Step 1 – 지도 이산화 및 전역 경로 탐색**: 장애물 경계에 Δd 간격으로 생성점을 배치해 Voronoi 다이어그램을 생성하고, A* 알고리즘을 적용해 시작점에서 목표점까지의 최단 조각선형 경로를 도출한다.
2️⃣ **Step 2 – 경로 정제 및 웜‑스타트 생성**: Bhattacharya‑Gavrilova의 코너 절단을 통해 경로 길이를 단축하고, 개선된 Euler 통합을 사용해 비용‑전파(energy + turn‑rate penalty)를 수행한다. 이 과정에서 얻어진 상태·입력 시퀀스가 OCP Solver의 초기 추정값이 된다.
3️⃣ **Step 3 – 최적 제어 문제 해결**: CasADi와 IPOPT를 이용해 비선형 프로그램(NLP) 형태로 OCP를 전사(transcribe)하고, Step 2에서 얻은 warm‑start를 사용해 최적 궤적을 계산한다. 이 단계는 기존 논문과 동일하게 유지하였다.
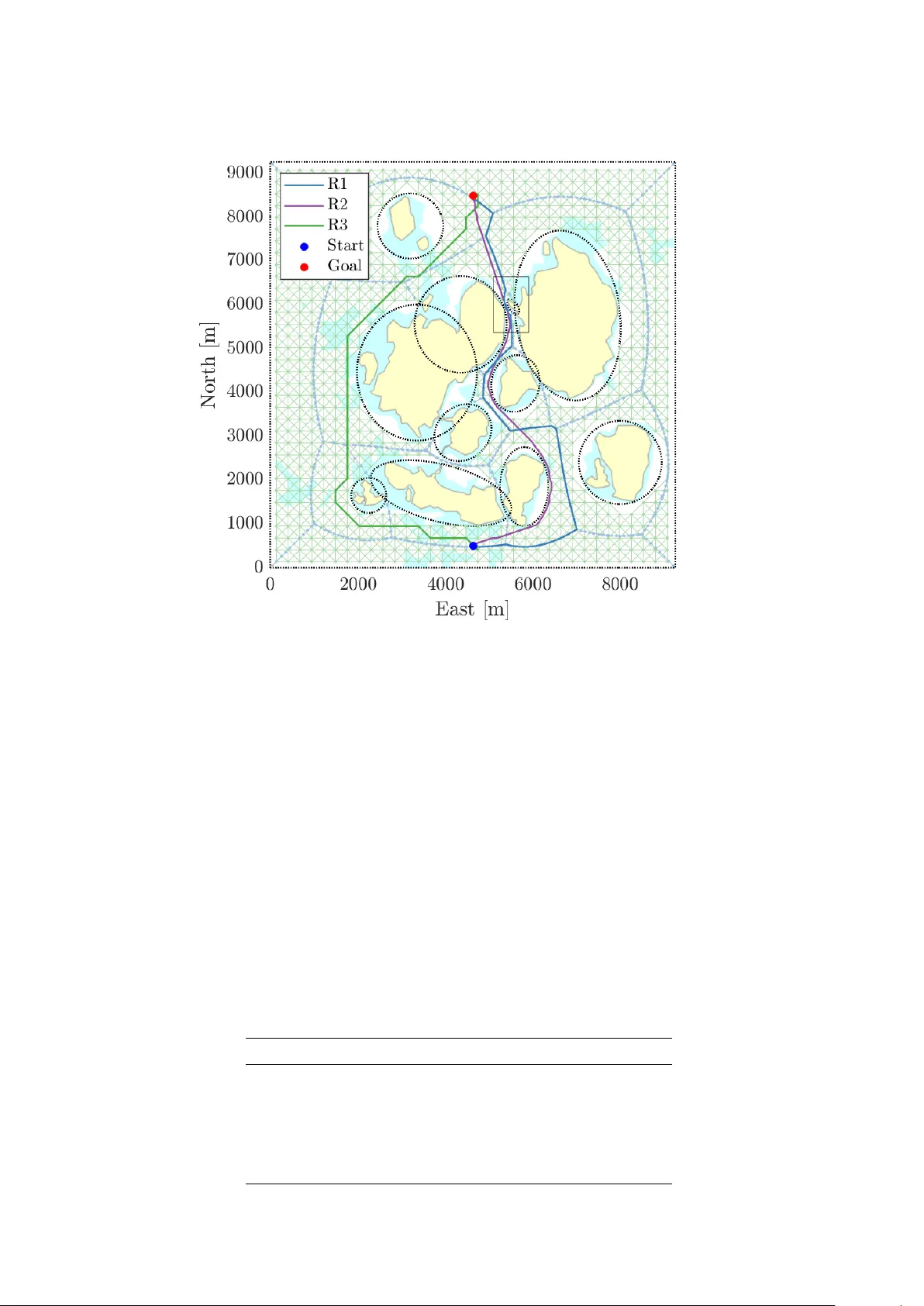
성능 평가는 노르웨이 스태반게르 북쪽 섬군을 모델링한 시뮬레이션 시나리오에서 수행되었다. 세 가지 실험 설정이 비교되었다.
- **R1**: 개선된 방법(Voronoi + 코너 절단 + Euler). Δd = 100 m, 833 비충돌 노드.
- **R2**: 기존 방법(밀집 균일 격자). Δd = 50 m, 22 929 비충돌 노드.
- **R3**: 기존 방법(희소 격자). Δd = 270 m, 843 비충돌 노드.
R1과 R2는 최종 에너지 소비가 거의 동일(≈2.75 × 10⁷ J)했으며, 두 방법 모두 중앙 협소 통로를 이용한 최단 경로를 찾았다. 반면 R3는 중앙 통로가 연결되지 않아 왼쪽 경로를 선택, 에너지 소비가 3.85 × 10⁷ J로 증가하였다. 실행 시간 측면에서 R1은 Step 1을 0.7 s, Step 2를 0.1 s에 완료해 전체 9.8 s(≈85 % 감소)로 수행했으며, R2는 각각 3.4 s와 2.2 s, R3는 0.3 s와 2.3 s를 소요했다. Step 3에서는 R1이 16.6 s, R2가 21.1 s, R3가 15.9 s로 차이가 있었지만, 전체 파이프라인의 시간 절감 효과는 여전히 크게 나타났다.
논문의 주요 기여는 (1) Voronoi 기반 이산화가 A* 탐색 공간을 효율적으로 희소화함을 실증, (2) 코너 절단과 Euler 통합이 경로 정제와 초기 추정값 생성에 드는 비용을 크게 낮춤, (3) 이러한 개선이 최종 궤적의 최적성(에너지, 시간)에는 영향을 주지 않으며, 전체 파이프라인의 실행 시간을 85 % 이상 단축한다는 점이다.
한계점으로는 Voronoi 생성 자체가 복잡한 환경에서 노드 수가 급증할 가능성, 코너 절단이 전역 최적성을 보장하지 못함, 그리고 Euler 통합이 낮은 정확도(1차)로 인해 매우 정밀한 비용‑전파가 필요할 경우 부정확할 수 있다는 점을 들 수 있다. 향후 연구에서는 동적 장애물에 대한 실시간 Voronoi 업데이트, 샘플링 기반 전역 경로 보강, 그리고 고차 통합 방법과의 트레이드오프 분석을 진행할 계획이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기