장시간 자율 비행 로터크래프트 무인항공시스템 및 시각 기반 정밀 착륙 기술
** 본 논문은 인간 개입 없이 장시간 연속 비행이 가능한 로터크래프트 UAS를 설계·구현한다. 핵심은 고레벨 마스터·슬레이브 상태머신으로 구성된 자율 엔진과, 다중 AprilTag 묶음을 이용한 시각 기반 정밀 착륙·충전 시스템이다. 실내 11시간·10.6시간, 실외 4시간 동안 각각 16·48·22회의 완전 자율 비행을 성공적으로 수행하였다. **
저자: Danylo Malyuta, Christian Brommer, Daniel Hentzen
**
본 논문은 정밀 농업 및 환경 모니터링 등 장기간 데이터 수집이 요구되는 분야를 위해, 인간 개입 없이 장시간 연속 운용이 가능한 로터크래프트 무인항공시스템(UAS)을 설계·구현하고, 그 성능을 실내·실외에서 검증한다.
1. **연구 배경 및 필요성**
- UN 식량·농업기구는 2050년까지 전 세계 식량 생산량을 70 % 증가시켜야 한다고 전망한다. 이를 위해 정밀 농업이 데이터‑드리븐 접근법으로 각광받고 있다.
- 현재 소형 쿼드콥터는 배터리 용량 제한으로 10‑20 분 정도만 비행이 가능하며, 장시간 관측을 위해서는 매 비행마다 인간이 배터리를 교체하거나 충전해야 하는 ‘human‑in‑the‑loop’ 구조가 필수적이다. 이는 비용·시간·인력 측면에서 비효율적이다.
2. **목표 및 주요 기여**
- 인간이 전혀 개입하지 않는 완전 자율 비행·충전 사이클을 구현한다.
- 고레벨 자율 엔진(마스터·슬레이브 상태머신)과 시각 기반 정밀 착륙(다중 AprilTag bundle + RLS 필터)을 핵심 기술로 제시한다.
- 실내·실외 장시간 실험을 통해 시스템의 신뢰성·안정성을 입증한다.
3. **시스템 아키텍처**
- **하드웨어**: AscTec Pelican 기반 쿼드콥터에 Odroid XU4(리눅스), mvBlueFOX 하향 카메라(100° FOV), FLIR Ax5 열화상 카메라, Trimble BD930‑UHF GPS, 3‑axis magnetometer, 6200 mAh LiPo 배터리, Skysense 접점식 충전 패드(90 × 90 cm) 등을 장착.
- **소프트웨어**: 센서 퓨전은 EKF 기반 Single Sensor Fusion(SSF)으로 구현, 비전 착륙 모듈은 AprilTag 2.0 검출 후 개별 태그 pose를 추정하고, RLS 필터를 통해 전체 bundle pose를 계산한다.
- **자율 엔진**: 마스터 상태머신은 ‘대기 → 사전점검 → 이륙 → 미션 수행 → 착륙 → 충전 → 데이터 전송 → 대기’ 순서로 전이한다. 슬레이브 상태머신은 각 단계 내 세부 행동(예: 고도 유지, 경로 생성, 비상 회피 등)을 담당한다.
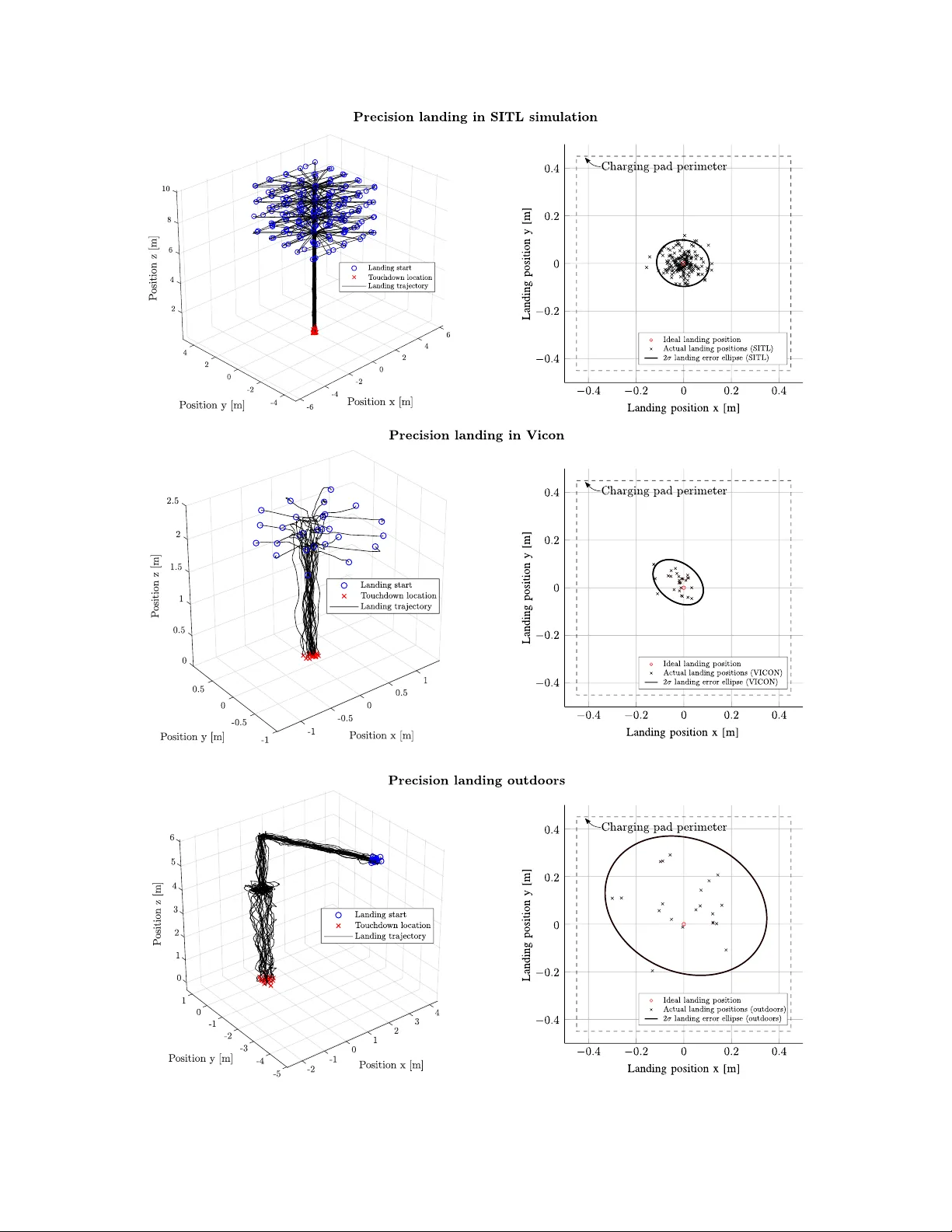
4. **시각 기반 정밀 착륙**
- 단일 AprilTag 대신 4~9개의 태그를 일정한 기하학적 패턴(예: 격자형, 원형)으로 배치해 시야 확보 범위를 넓히고, 거리·각도에 따른 검출 성공률을 향상시켰다.
- 각 태그의 6‑DOF pose를 개별적으로 추정한 뒤, RLS 필터를 적용해 공통 좌표계로 변환, 평균 위치 오차를 1 cm 이하, 평균 자세 오차를 0.5° 이하로 감소시켰다.
- 실험에서는 5 m 고도부터 0.5 m 고도까지 연속적으로 태그를 인식했으며, 조명 변화와 부분 가림에도 높은 검출률을 유지했다.
5. **실험 설정 및 결과**
- **실내 실험 1**: 11 시간 동안 16회 비행, 평균 비행 시간 38 min, 충전 시간 6 h 20 min.
- **실내 실험 2**: 10.6 시간 동안 48회 비행, 평균 비행 시간 13 min, 충전 시간 2 h 30 min.
- **실외 실험**: 캘리포니아 WSREC 현장에서 4 시간 동안 22회 비행, 비행·충전 비율 1:10, 평균 비행 시간 10 min, 충전 시간 100 min.
- 모든 비행은 인간 조작 없이 자동으로 진행되었으며, 비상 상황(배터리 급격 감소, GPS 신호 손실 등) 발생 시 즉시 안전 착륙 및 대기 모드로 전이하였다.
- 데이터 전송은 착륙 중 Wi‑Fi를 통해 실시간으로 베이스 스테이션에 업로드되었고, 미션 업데이트도 착륙 시 가능하도록 설계하였다.
6. **비교 및 차별점**
- 기존 연구는 VICON 등 실내 모션 캡처 기반 정밀 착륙에 의존하거나, 무선 충전·배터리 스와핑 등 복잡한 하드웨어를 필요로 했다. 본 시스템은 저비용 카메라와 상업용 접점식 충전 패드만으로 실외에서도 1 cm 수준의 착륙 정확도를 달성했다.
- 또한, 마스터·슬레이브 상태머신 구조는 시스템 전반에 걸친 오류 검출·복구 메커니즘을 일관되게 적용할 수 있게 하여, 장시간 운용 시 발생할 수 있는 다양한 장애에 대한 강인성을 제공한다.
7. **제한점 및 향후 연구**
- 현재 착륙 패드는 고정식이며, 이동형 혹은 다중 착륙 지점에 대한 자동 탐색·착륙 기능은 구현되지 않았다.
- 충전 방식이 접점식이므로 충전 시간이 전체 운영 효율에 큰 영향을 미친다. 무선 충전, 배터리 스와핑, 혹은 고에너지 밀도 배터리 적용을 통해 비행·충전 비율을 개선할 필요가 있다.
- 다중 드론 협업을 위한 충전 스테이션 공유, 충전 스케줄링, 그리고 대규모 농업 현장에서의 네트워크 기반 데이터 관리 등도 향후 연구 과제로 제시된다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기