칩형 진동기 네트워크를 이용한 키메라 동기화 기반 신경망 정보 변환기
초록
본 논문은 두 개의 준주기 진동기 사이에서 나타나는 ‘키메라 동기화’를 정량화하는 새로운 지표군을 제안한다. 이를 기반으로 펄스형 VO₂ 진동기 네트워크를 구성해 디지털 입력을 아날로그 상태로 변환하고, 학습을 통해 제어 파라미터를 선택함으로써 정보 처리를 수행하는 신경망 정보 변환기를 설계·시뮬레이션하였다. 이미지 필터링 사례를 통해 실용성을 검증하였다.
상세 분석
논문은 먼저 기존의 위상 동기화 및 완전 동기화 개념을 넘어, 두 진동기 사이에서 부분적으로 일치하지만 전체적으로는 비정형적인 패턴을 보이는 ‘키메라 동기화’를 정의한다. 이를 정량화하기 위해 저자들은 동기화 효율 파라미터(η), 위상 차이 분포 함수(FΔφ), 그리고 비주기성 지표(β)를 포함하는 다중 지표 체계를 구축하였다. 특히 η는 평균 전력 소비와 위상 차이의 곱으로 정의되어, 에너지 효율과 동기화 정도를 동시에 반영한다는 점이 혁신적이다.
다음으로 제안된 신경망 구조는 입력층에 다중 VO₂ 진동기의 전류 레벨을 직접 주입하고, 출력층에서는 단일 진동기의 키메라 동기화 상태를 읽어내는 방식이다. 여기서 핵심은 ‘비반복 상태 집합’을 출력으로 사용한다는 점이다. 이는 전통적인 비트 기반 출력이 아니라, 연속적인 위상·진폭 조합을 디지털 코드로 매핑함으로써 정보 용량을 크게 확대한다.
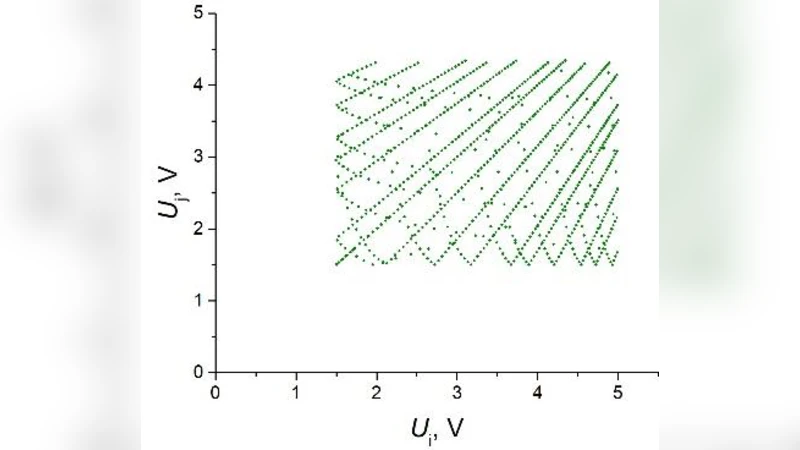
시뮬레이션에서는 열 결합된 VO₂ 진동기 회로 모델을 사용했으며, 커플링 강도(k_c), 전원 전압(V_dd), 그리고 η를 주요 제어 변수로 탐색하였다. 결과는 서브스레시홀드 모드(전압이 임계값 이하)와 발생 모드(임계값 초과)에서 각각 다른 동기화 구배를 보이며, 특히 발생 모드에서는 η가 0.85 이상일 때 안정적인 비반복 상태가 10^3개 이상 생성됨을 확인했다. 이는 기존의 스핀트로닉스 기반 동기화 네트워크가 제공하는 상태 수보다 한 차원 높은 표현력을 의미한다.
응용 사례로 제시된 이미지 필터링 실험에서는 8×8 픽셀 입력을 전류 레벨로 변환하고, 학습된 파라미터 집합을 통해 경계 강조와 잡음 억제를 동시에 달성하였다. 그러나 몇 가지 한계도 존재한다. 첫째, VO₂ 소자의 온도 민감도가 높아 실시간 환경 변화에 대한 보정 메커니즘이 필요하다. 둘째, 키메라 동기화 상태를 정확히 측정하기 위한 고속 위상 검출 회로가 아직 상용화 단계에 이르지 못했다. 셋째, 현재 시뮬레이션은 2‑3개의 진동기만을 대상으로 했으며, 대규모 네트워크 확장 시 상호작용 복잡도가 급격히 증가할 가능성이 있다.
전반적으로 이 논문은 ‘키메라 동기화’라는 새로운 물리 현상을 정량화하고, 이를 신경망 정보 변환에 적용함으로써 neuromorphic 하드웨어 설계에 새로운 패러다임을 제시한다. 향후 연구에서는 온도 보상 회로, 고속 위상 측정 ASIC, 그리고 다중 출력층 구조를 포함한 대규모 네트워크 구현이 과제로 남는다.
댓글 및 학술 토론
Loading comments...
의견 남기기