우선순위가 있는 성장 원판 및 사각형을 위한 빠른 알고리즘
초록
본 논문은 지도 라벨링에서 유도된 문제인, 서로 다른 성장 속도를 가진 원판(또는 사각형)들이 충돌할 때 우선순위가 낮은 객체가 사라지는 과정을 효율적으로 시뮬레이션하는 알고리즘을 제시한다. 기존의 $O(n^2\log n)$ 수준 알고리즘을 넘어, $O(n^{5/3+\varepsilon})$ 기대 시간(디스크) 및 $O(n^{11/6+\varepsilon})$ 기대 시간(사각형)으로 서브쿼드라틱 성능을 달성한다. 또한, 쿼드트리 기반 방법을 이용해 $O\big(n(\log n+\min{\log\Delta,\log\Phi})\big)$ 시간 알고리즘을 제안하고, $\Omega(n\log n)$ 하한을 통해 거의 최적임을 보인다.
상세 분석
논문은 먼저 성장 원판(또는 일반적인 반대수적 형태)의 충돌 시점 $t(i,j)=\frac{|p_i-p_j|}{v_i+v_j}$ 를 정의하고, “우선순위가 높은(인덱스가 작은) 원판이 살아남는다”는 규칙을 기반으로 제거 순서를 결정한다. 가장 직관적인 구현은 모든 쌍을 검사해 $O(n^2)$ 시간에 해결하는 알고리즘(Algorithm 1)이며, 이는 $d$ 차원까지 일반화 가능함을 보인다. 서브쿼드라틱 성능을 얻기 위해 저자들은 버킷 기법과 고차원 하위포락선(lower envelope) 구조를 결합한다. 구체적으로, 인덱스가 연속적인 $m$개의 원판을 하나의 버킷으로 묶고, 각 버킷에 대해 $f_j(x,y,v)=\frac{|(x,y)-(p_j)|}{v+v_j}$ 형태의 3차원 함수 집합을 만든다. 이 함수들의 하위포락선을 전처리하면, 새로운 원판이 들어올 때 해당 버킷에서 “가장 먼저 충돌하는 살아있는 원판”을 $O(\log^2 m)$ 시간에 찾을 수 있다. 하위포락선 전처리는 Agarwal et al.의 결과를 이용해 $O(m^{3+\varepsilon})$ 시간·공간을 소요한다. 전체 알고리즘은 $n/m$개의 버킷을 순차 처리하면서, 각 원판에 대해 이전 버킷들의 쿼리를 수행하고, 현재 버킷 내부는 선형 탐색으로 처리한다. 최적의 $m=n^{1/3}$ 를 선택하면 전체 기대 시간은 $O(n^{5/3+\varepsilon})$ 가 된다.
다음으로, 사각형과 같은 4-파라미터 형태에 대해서는 함수 차원이 5가 되므로, Chazelle‑Koltun의 고차원 면 배열(point‑location) 구조를 적용한다. 이 경우 전처리 복잡도는 $O(m^{2d-4+\varepsilon})$ 로, $d=5$ 일 때 $O(m^{6+\varepsilon})$ 이지만, $m=n^{1/3}$ 로 설정하면 사각형에 대해 $O(n^{11/6+\varepsilon})$ 의 기대 시간을 얻는다.
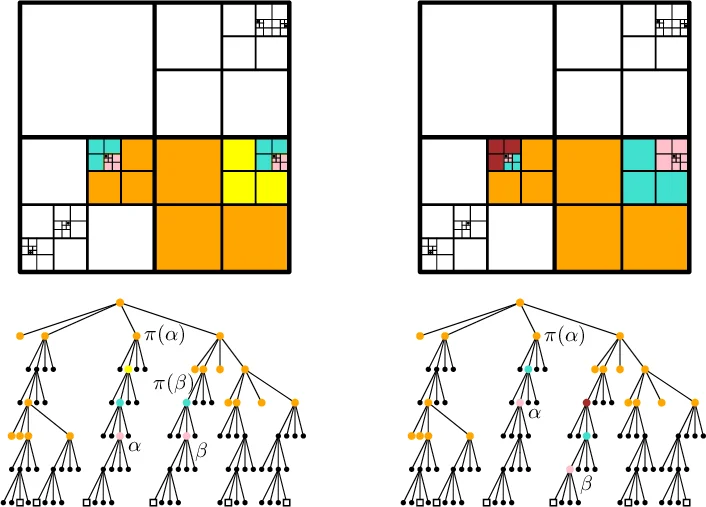
쿼드트리 기반 접근법은 입력 포인트들의 거리 스프레드 $\Phi=\frac{\max_{i\neq j}|p_i-p_j|}{\min_{i\neq j}|p_i-p_j|}$ 와 성장 속도 비율 $\Delta=\frac{\max_i v_i}{\min_i v_i}$ 를 활용한다. 원판 중심을 사각형 셀에 삽입하면서, 각 셀에 포함된 원판들의 성장 속도와 위치를 정렬해 $O(\log\Delta)$ 혹은 $O(\log\Phi)$ 로 충돌 후보를 제한한다. 최종 복합 복잡도는 $O\big(n(\log n+\min{\log\Delta,\log\Phi})\big)$ 로, 특히 $\Delta$ 혹은 $\Phi$ 가 다항식 수준이면 거의 선형에 가깝다.
마지막으로, 정렬을 통한 $\Omega(n\log n)$ 하한을 제시함으로써 쿼드트리 알고리즘이 이론적으로 최적에 가깝다는 점을 증명한다. 전체적으로, 논문은 기존 알고리즘들의 지수적·다항적 비효율성을 극복하고, 고차원 기하학적 구조와 데이터 구조 기법을 결합해 실용적·이론적 기여를 동시에 달성한다.
댓글 및 학술 토론
Loading comments...
의견 남기기