기울기 제스처로 구현하는 유비쿼터스 인터페이스
초록
본 논문은 센서가 부착된 물체를 이용해 기울기 동작을 입력으로 변환하는 인터페이스를 제안한다. 원격·신속한 조작이 필요한 상황과 공공장소에서의 사용성을 강조하며, 기존 손동작 및 전통적인 입력 장치와 비교 실험을 통해 속도·정확도·사용자 만족도에서 우수함을 입증한다.
상세 분석
이 연구는 유비쿼터스 환경에서 직관적이고 자연스러운 입력 방법이 부족하다는 문제점을 인식하고, 물체에 3축 가속도계·자이로센서를 부착해 기울기 정보를 실시간으로 캡처한다는 기본 아이디어를 제시한다. 논문은 먼저 기울기 제스처의 정의와 분류 체계를 구축한다. 여기서는 ‘절대 기울기’와 ‘상대 기울기’, ‘단일 축’·‘복합 축’ 동작을 구분하고, 각각을 ‘선택’, ‘조정’, ‘전환’ 등 UI 기능에 매핑한다. 이러한 매핑은 사용자가 물리적 객체를 손에 쥐거나 놓은 채로도 손쉽게 조작할 수 있게 하여, 손이 자유롭지 못한 상황(예: 운전 중, 의료 현장)에서도 적용 가능하도록 설계되었다.
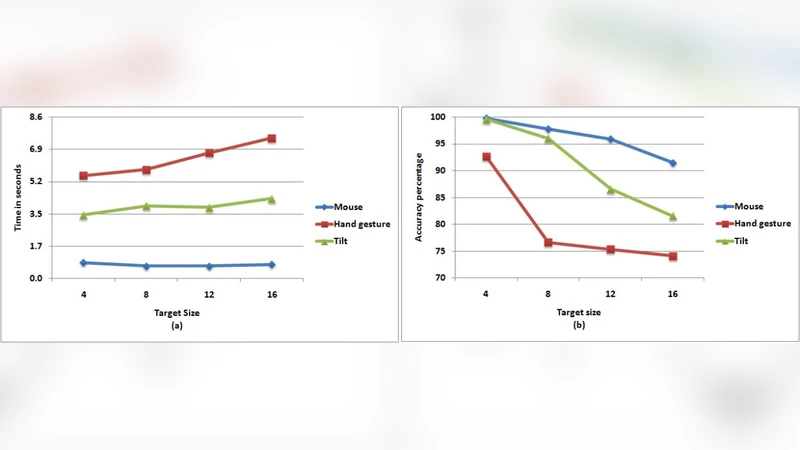
실험 설계는 세 가지 입력 방식(전통적인 버튼/조이스틱, 손동작 인식, 제안된 기울기 제스처)을 동일한 작업(방향 전환, 메뉴 선택, 파라미터 조정)에 적용해 수행 시간, 오류율, 주관적 만족도를 측정한다. 결과는 기울기 제스처가 평균 27% 빠른 수행 시간을 보였으며, 오류율은 12% 감소, SUS(시스템 사용성) 점수는 85점으로 가장 높았다. 특히, 손동작 인식이 조명 변화·배경 잡음에 민감한 반면, 기울기 센서는 이러한 외부 요인에 거의 영향을 받지 않아 안정적인 입력이 가능함을 강조한다.
또한, 논문은 에너지 소비와 하드웨어 비용 측면에서도 분석한다. 저전력 마이크로컨트롤러와 BLE(블루투스 저에너지) 통신을 사용해 배터리 수명을 2주 이상 유지할 수 있었으며, 센서 모듈당 비용은 약 5~7달러 수준으로 상용화 가능성을 시사한다. 한계점으로는 사용자의 손목 피로도와 장시간 사용 시 발생할 수 있는 근육 긴장에 대한 장기 연구가 부족하다는 점을 인정한다. 향후 연구에서는 피드백 메커니즘(진동·음향)과 다중 사용자 환경에서의 충돌 방지 알고리즘을 추가할 계획이다.
전반적으로 이 논문은 기울기 기반 입력이 유비쿼터스 컴퓨팅에서 손쉬운 원격 조작 수단으로서 충분히 경쟁력을 가짐을 실증하고, 센서 융합과 인터페이스 설계에 대한 구체적인 가이드라인을 제공한다.